GIS alkalmazások I (folytatás)
(1)
Térbeli
Döntéstámogató Rendszerek - TDR (folytatás)
Döntéstámogatás az
IDRISI GIS szoftverben
Az IDRISI azok közé a ritka GIS szoftverek
közé tartozik, melyek sztenderd függvényei között direkt eszközöket találunk a
döntéstámogatásra, pontosabban fogalmazva a döntéstámogatásnak azokra az
eseteire is, melyek meghaladják a valamilyen szempontból szükséges
tulajdonságok összességét tartalmazó helyek megtalálását eredményező "overlay" technikákat.
A döntéseket a következő
csoportokba foglalhatjuk:
- egy cél - egy kritérium;
- egy cél - több kritérium;
- több cél - több kritérium.
Az egy célt egy
kritériummal leíró feladat nem igényel külön eszközöket a GIS-től.
Mindössze arra van szükségünk, hogy a kritériumot összhangba hozzuk a
megjelenített fedvény attribútumaival. Azaz, ha például egy lejtő kategória
térképpel dolgozunk, melyen a lejtések 1 %-os lépcsőkben vannak ábrázolva a mi
kritériumunk pedig az, hogy a keresett hely lejtése nem lehet nagyobb 5%-nál,
úgy nem kell mást tennünk mint átosztályozni a képet oly módon, hogy a 0-1,
1-2, 2-3, 3-4, 4-5 százalékos lejtésű cellák 1 értéket kapjanak a többiek pedig
0-t. A megjelenített új képen az 1 értékű cellák jelentik a megfelelő helyeket.
Már ez az egyszerű feladat is bonyolódik azonban, ha bár megengedjük az 5%-os
lejtést, de azért arra törekszünk, hogy lehetőleg minél síkabb legyen a kiválasztott
terület. Ebben az esetben meghagyjuk az 5% alatti lépcsőket és úgy választjuk a
területet, hogy lehetőleg minél kisebb lejtésű pixelekre essen (ne felejtsük
el, hogy egy kritérium van, tehát ebben a feladatban nem adhatjuk meg a
szükséges terület nagyságát is).
Mivel a GIS adatbázisban szereplő értékek nem hibátlanok az IDRISI-ben lehetőség
van e hibák okozta kockázat figyelembe vételére is. Képzeljük el, hogy egy
folyó mértékadó áradása 9 méteren következik be. Ha a terepről rendelkezésünkre
álló magasságmodell nem hibás, úgy az áradáskor minden olyan terület víz alá
kerülne, mely a kérdéses 6 méteres színt alatt van. A PCLASS modul segítségével
azonban megnézhetjük, hogy mi a valószínűsége annak, hogy ez bekövetkezzen.
|
|
6.11 ábra - a PCLASS modul vezérlő panelja
|
|
|
6.11 ábra - a "puha" osztályozás eredménye
|
A PCLASS-tól azt kérdeztük meg, hogy mi a valószínűsége annak, hogy minden
pixel alacsonyabb a küszöbnek megadott 9 m-nél, az eredményt a 6.12 ábra
tartalmazza. A sötétzöld értékek 1 körüliek, a világosabb zöld 0.96, a következő
0.91, stb. Ezután döntenünk kell a kockázati tényezőről, ha például 5%-ban
állapítjuk meg, akkor átosztályozzuk a szelvényt úgy, hogy minden pixel ami
nagyobb 0.95-nél 1 lesz, a többi 0, és az elárasztott területnek az előbbit
tekintjük.
Az egy cél - több kritérium típusú feladat a leggyakoribb a GIS-ben,
s mivel ennek a megoldásán alapul a következő legáltalánosabb feladat típus is,
megkíséreljük összefoglalni a megoldás lehetséges módszereit.
A tényezőket (pld. lejtő kategória, távolság az utaktól, stb.) egy-egy réteg
ábrázolja. A konkrét pixel értékeknek minden rétegen osztályzatokat adunk abból
a szempontjából, hogy mennyire alkalmasak a cél megvalósítására . Ezeket az
osztályzatokat minden rétegben azonos skálára húzzuk szét a STRECH modullal.
Rendelhetünk a rétegekhez bináris, korlátozásokat is (ezek a réteg bizonyos
pixel értékeire zérus, a többire egység értéket vesznek fel). A következő
lépésben a tényezők súlyait határozzuk meg a páronkénti összehasonlítás
módszerével.
Ez a módszer mindig két tényező egymáshoz viszonyított fontosságát értékeli az
alábbi skála felhasználásával:
|
||||||||||||||||||
|
||||||||||||||||||
6.1 táblázat - a páronkénti összehasonlítás érték skálája
|
Ha most már valamely cél
eléréséhez a következő faktorok figyelembe vételére van szükségünk:
- út közelség
- város közelség
- lejtés
- tanyaközponttól való távolság
- parktól való távolság
akkor a feladat
ismerete alapján például a következő összehasonlítási mátrixot írhatjuk fel.
Megjegyezzük, hogy a mátrix szimmetrikus a főátlóra ezért elég csak a bal alsó
háromszög mátrixot kitölteni, ha a súlyok meghatározásához az IDRISI WEIGHT
modulját használjuk.
|
|
út közelség |
város
közelség |
lejtés |
tanyaközpont
távolság |
park
távolság |
|
út közelség |
1 |
3 |
1 |
7 |
2 |
|
város
közelség |
1/3 |
1 |
1/4 |
1/2 |
1/2 |
|
lejtés |
1 |
4 |
1 |
7 |
2 |
|
tanyaközpont
távolság |
1/7 |
2 |
1/7 |
1 |
1/4 |
|
park
távolság |
1/2 |
2 |
1/2 |
4 |
1 |
6.2 táblázat - a faktorok páronkénti összehasonlítása
A páronkénti összehasonlítás
mátrixából a keresett súlyokat a fő sajátvektor szolgáltatja. Ha nem áll
rendelkezésünkre megfelelő szoftver, úgy közelítésként azt a megoldást is
alkalmazhatjuk, hogy minden tagot az első, második, ... ,ötödik oszlopban
elosztjuk a megfelelő oszlop összegével, majd vesszük az így kapott értékek
soronkénti átlagát, melyek a legtöbb esetben jól közelítik a keresett súlyokat.
|
A feladatot
egyszerűbben a WEIGHT modul segítségével oldhatjuk meg. Először az EDIT modulban a
"Pairwise comparison file" feliratú rádió gomb bejelölése után a
látható formátumban (bal alsó háromszög) bebillentyűzzük a mátrixot a
szerkesztőbe és .pcf kiterjesztéssel mentjük. |
|
|
||
|
Ezután már minden
rendelkezésünkre áll, hogy meghatározzuk a kérdéses cél alkalmassági térképét
az alábbi összefüggés segítségével:
A = ∑ wi·xi ∏
cj (6.1),
ahol A - az alkalmassági érték, wi - az i-edik faktor súlya, xi
- az i-edik faktor osztályzati értéke, cj - a j-edik korlátozás
értéke. A képletet kiszámíthatnánk a SCALAR és OVERLAY modulok
különböző paraméterekkel történő egymásutáni alkalmazásával is, e helyett
azonban kényelmesebb az IDRISI MCE moduljának alkalmazása, mely a
feladatot egy menetben oldja meg.
Az MCE modulnak meg kell adni azokat bájt bináris, egyenlő sávszélességű
(0-255) faktor képeket, melyeket korábban pld. a domborzatból,
földhasználatból, stb. csináltunk és megadni hozzá az előbb kiszámolt súlyokat.
Az MCE elkészíti a kérdéses cél hasznossági térképét. A
hasznossági térképből azonban még ki kell választani a legjobb pixeleket
olyan mennyiségben, amilyen mennyiségben szükségünk van rájuk (pld. 5000 ha).
Az ehhez szükséges következő lépést a RANK modul hajtja végre,
mely növekvő vagy csökkenő sorrendben (1 lesz a legjobb) rangsorolja a
pixeleket, és egy olyan képet eredményez, melyben a pixelek értéke egyenlő lesz
a rangjukkal. Ezután újra osztályozzuk a képet, az ASSIGN modullal 1-et
adunk mindazoknak, melyek megfelelnek és kitöltik a kívánt területet, míg 0-t a
többinek.
A több cél - több kritérium típusú feladatokat két nagy csoportba
soroljuk. Az első csoport a kiegészítő célok csoportja, melyet az
a tény jellemez, hogy a kijelölendő földterület egyidejűlegtöbb
célnak is megfeleljen (pld. üdülőövezet és vadrezervátum).
Ennek a feladatnak a megoldását az egy cél - több kritérium esetében
alkalmazott lineáris összegzési technika hierarchikus kiterjesztése jelenti. Ez
gyakorlatilag azt jelenti, hogy az egyes célok szempontjából kidolgozott hasznossági
térképeket úgy tekintjük, mintha faktor osztályzati térképek lennének,
meghatározzuk a célok súlyait és alkalmazzuk a 6.1 képletet.
Az esetek többségében egy
kiválasztott terület csak egy célra használható, ez a helyzet ha
földhasználati tervezést akarunk végrehajtani egy bizonyos területen, például
ki akarjuk jelölni a lakó-, ipari- és mezőgazdasági övezeteket az elkövetkező
fejlesztési időszakra. A feladat első lépcsőjében célonként külön külön, a fent
leírtak szerint, elkészítjük az alkalmassági térképeket. Ha a rangsorolás és a
szükséges terület nagyság kijelölése után a kapott területek nem fedik egymást,
úgy a feladatot megoldottuk és további lépések nem szükségesek. Rendszerint
azonban konfliktus lép fel a különböző területek között, azaz ugyanazt
a területet több célból is kijelöltük.
Bizonyos esetekben elérhető az elsőbbségi vagy prioritásos megoldás.
Ez a módszer fontossági sorrendbe állítja a célokat. Ezután a RANK modul
segítségével kielégíti a legfontosabb célt, majd az első célhoz rendelt
pixeleknek 0 értéket ad a RECLASS modullal. A már elfoglalt pixelekkel
maszkolja a fontosságilag második alkalmassági térképet, elvégzi a rendezést,
kiválasztja a második cél pixeleit, lenullázza azokat, és így folytatja az
eljárást amíg a célok el nem fogynak.
Sokkal használhatóbb azonban a kompromisszum kereséses eljárás
mely kényelmes megoldására az IDRISI a MOLA modult kínálja. A modul
alapelvét két cél esetére a 6.14 ábra szemlélteti.
|
|
6.14 ábra - a MOLA modul működési elvének illusztrációja két cél esetére
|
Az ábra y tengelyén
szerepelnek a második cél, x tengelyén pedig az első cél alkalmassági
értékei. A rózsaszín téglalap jelképezi azt a terület részt, mely alkalmas a
második cél szempontjából, de nem alkalmas az első cél számára, mivel annak
osztályzatai (az x tengelyen látható értékek) túl alacsonyak. A zöld
téglalap pedig azt a területet reprezentálja, mely megfelelő az első célnak de
nem alkalmas a másodiknak. Ezeken a területeken tehát nincs konfliktus. Nincs
konfliktus a fehér téglalap által képviselt területen sem, mivel az egyik
célnak sem felel meg. A konfliktus helyzet a piros téglalappal jelzett
területen lép fel. Ha meghúzunk a kezdőpontból kiindulva egy 45°-os egyenest,
úgy nem nehéz belátni, hogy az egyenes felett ábrázolt pixelek közelebb vannak
a kettes cél optimális értékéhez mint az egyes céléhoz, az egyenes alattiaknak
pedig az egyes cél ideális értékétől mért távolsága kisebb mint a kettes
célétól számított (megjegyezzük, hogyha a célok különböző súlyúak az egyenes dűlése
eltér a 45°-tól). A modul tehát úgy működik, hogy az egyenes feletti pixeleket
a piros tartományból a kettes célhoz rendeli, míg az egyenes alattiakat az
egyes célhoz. Így azonban még nem biztos, hogy a célok területi igényei is
kielégítésre kerültek, ezért az eljárás iterációval mindig újabb területeket
rendel a fehér zónából a színes zónákhoz mindaddig, míg a területi célokat is
sikerül kielégítenie.
A MOLA gyakorlati
alkalmazása során meg kell adnunk a célok számát (maximum 15 cél is lehet nem
csak kettő mint az ábrán), neveit , relatív súlyukat, a rangsorolt alkalmassági
térképek nevét és az egyes célokhoz rendelt terület nagyságot, a területi tűrést
és a kimenő kép nevét. Az adatok bevitele után megindul az eljárás és iteratív
módon hozzárendeli a célokhoz a megadott területeket.
Az IDRISI döntés támogató
képességeinek felvázolásával azt szerettük volna demonstrálni, hogy helyes az
az állításunk, miszerint még a téma szempontjából leginkább
"kihegyezett" GIS szoftver is csak néhány témában képes a
döntéshozásra, nem rendelkezik fejlesztő környezettel, mellyel újabb
bonyolultabb modelleket lehetne létrehozni, de talán a legnagyobb hiányosság,
hogy hiányzik az a felhasználói interfész, mely lehetővé tenné a dinamikus,
interaktív döntés támogatást.
Példák GIS
rendszerekbe ágyazott döntéstámogató-modellező alkalmazásokra és fordítottjukra
(amikor a modellező rendszerbe ágyaznak grafikus rutinokat)
Talán a hosszú alcím is sejteti,
hogy ebben a részben számos alkalmazást tudnánk ismertetni. A terjedelmi és nem
utolsó sorban az idő korlátok azonban mértékletességre intenek. Mivel a
tematikus alkalmazások során még szándékunkban áll további modellek bemutatása,
ezen a helyen csak néhány olyan alkalmazásra térünk ki röviden, melyek a TDR
architektúrája szempontjából is érdeklődésre tarthatnak igényt.
A 90-es évek elején M. Batty és Y
Xie település fejlődési modellezés kapcsán megvizsgálták a modellező modul és a
GIS kapcsolatának két szélső esetét [2], [3].
A szorosan kapcsolt rendszerekben
az analitikus és modellező programszegmenseket a GIS keretén belül kódolják a
kérdéses GIS fejlesztő nyelvével, mely példánk esetében az Arc/Info makro
nyelve az AML.
|
|
6.15 ábra - Arc/Info-ban létrehozott urbanizációs modell
|
A felhasználó szempontjából ez a
módszer egyenértékű a GIS függvényeinek kiterjesztésével. Ha például a
felhasználó lekérdezési módban használja az egeret, úgy a kattintás hatására a
GIS megküldi a modellező modulnak a kérdéses hely koordinátáit, mely ennek
hatására kiszámolja a kérdéses helyre vonatkozó modell értéket és megjeleníti
egy ablakban.
Másik előnye a GIS-be integrált
architektúrának a laza kapcsolást jelentősen meghaladó műveleti sebesség.
A módszer fő hátránya a mellett,
hogy örökli a GIS statikusságát az, hogy a GIS specifikus fejlesztő nyelven
programozott modell csak a kérdéses GIS-ben futtatható. Természetes hátrány az
is, hogy a korábban már valamilyen általános programozási nyelven készített és
kipróbált modellek ebbe az architektúrába nem illeszthetők bele. A 6.15 ábra
példájában, az ábra tetején szerepel a folyamatábra formában létrehozott főmenü,
a jobb alsó ablakban az AML parancs ablak, míg középen a Buffaló városi körzet
népsűrűsége (bal oldali kép), várható népsűrűsége (középső kép) és a kettő
különbsége (jobb oldali kép) látható.
A másik szélső esetben az elemző
program külön készül és a GIS-szel csak az adatokon keresztül kommunikál egy
vagy két irányban. Két irányú kommunikáció esetén először a felhasználó betölti
a kérdéses térbeli fájlt a modellező szoftverbe, majd az az által produkált
térbeli modellt megjeleníti a GIS-szel. Egy irányú kommunikáció esetén a
modellező szoftver betölti a kijelölt térbeli fájlt, de a megjelenítést is a
saját rajzi eszközeivel a GIS-től függetlenül végzi (6.16 ábra). Ez azonban
további hátrányokkal is járhat (hacsak a modellező szoftver nem rendelkezik
fejlett GIS képességekkel), mivel nemcsak az egérrel végzett lekérdezések
válnak lehetetlenné, hanem a zoomolás is, illetve változó földrajzi feltételek
esetén, ha például a vizsgált város több kerületre oszlik át kell alakítani a
modul grafikus megjelenítését végző program rész kódját.
|
|
6.16 ábra - a munkahely és lakóhely kölcsönhatását elemző modell
beépített megjelenítő rutinnal
|
Érdekes megemlíteni, hogy a város
és városi környezet fejlődéssel kapcsolatos legújabb modell [4], melyről szóló ismertetés egyelőre a webről
is letölthető
továbbra is a GIS-szel kiépített laza kapcsolat alapján készült.
A PUP (Projections for Urban
Planning = várostervezési vetítések) nevű C nyelven írott modellező program
keretét a 6.17 ábrán mutatjuk be (mivel a folyamat ábra jelölései többnyire
közismert rövidítések eltekintettünk magyar változata megrajzolásától).
|
|
6.17 ábra - a PUP program folyamat ábrája
|
A program vezérlése a grafikus
felhasználói interfészen (GUI) keresztül történik. A felhasználó kitölti a HTML
űrlapon a modellezés forgató könyvére vonatkozó paramétereket, melyeket a WEB
szerver továbbít az előrejelző programnak. E paraméterek felhasználásával a
program beolvassa a térbeli adatokat, elvégzi a kért változók előrejelzését és
egy sor output adatot gyárt. A vezérlés ezután visszakerül a HTML űrlaphoz
melyen a felhasználó kiválaszthatja, hogy meg akarja-e nézni az eredményeket,
vagy pedig új forgatókönyvet kíván futtatni új paraméterekkel.
A C nyelvű program lefordított
kódja egy biztonságos WEB szerveren fut. A GUI-nak választott HTML nyelv és
fordítói ingyenesek, könnyen kezelhetők és operációs rendszer függetlenek
legalább is a tallózót futtató felhasználó számára (ezért is esett a választás
a HTML-re), az űrlap működését JavaScript program segíti.
A GIS és a modellező program
(PUP) laza kapcsolata úgy realizálódik, hogy az előrejelző program a térbeli
bemenő adatokat GIS által készített fájlokból nyeri az eredményeket pedig
szintén olyan ASCII táblázatos fájlokba írja ki, melyeket az Arc/Info GRID modulja
inputként elfogad. Outputként ezen kívül még VRML (virtual reality modelling
language) szkript is készül a megjelenítéshez. A megjelenítés az előzőekből
következően VRML kiegészítéssel (pld. CosmoPlayer plug-in) ellátott tallózóban
történik (6.18 ábra).
|
|
6.18 ábra - az Adelaide városi vonzáskörzet Noarlunga részén várható népsűrűség
kiinduló VRML képe az 1999-2020 évekre vetített előrejelzéshez
|
A VRML tallózó biztosítja az
animációt, melyet a PUP outputja kapcsán már említett VRML szkript tesz lehetővé
olymódon, hogy olyan gombokat és csúszkákat hoz létre a képen, melyek
segítségével a felhasználó változtathatja az animáció sebességét, illetve egyes
évekre vonatkozó állóképeket jeleníthet meg. Lehetőség van a 3D-s ábra
forgatására, nagyítására, az ábra feletti repülésre, stb. Amint a folyamat
ábrából is látható mind a 3D-s, mind a 2D-s változó előrejelzés egyedileg is
lekérdezhető adott cellára és évre vonatkozóan. Az Arc/Info GRID formátumú
adatok pedig tovább elemzhetők az Arc/Info GRID moduljában.
A figyelmes olvasó valószínűleg
észrevette, hogy eddig a fő hangsúlyt a rendszerek felépítésére fordítottuk és
nem mélyedtünk el abban, hogy mit, milyen céllal és milyen módszerrel kívánunk
modellezni. A következő példánkban, ha kis mértékben is, de eltérünk ettől a
tárgyalási módtól és megpróbáljuk felvázolni a modell tartalmi kérdéseit is.
Következő, szintén laza kapcsolatú példánk a
szabatos szállítási időpontok meghatározását célozza városi környezetben [5].
Az iparban és a szolgáltatásokban
nagy szerepe van az úgy nevezett Időre Érzékeny Szervezésnek (angolul
Time-critical logistics = TCL), ami például azt jelenti, hogy a gyártó egység
nem alkalmaz raktárkészletet, hanem akkora rendeli az alkatrészeket, amikorra
beépítésüket a technológiai folyamat előírja. Talán egyszerűbb, de az egyén
számára fontosabb példa, ha azt akarjuk megbecsülni, hogy a 8 órakor induló
repülőgéphez mikor kell elindulnunk és milyen úton, ahhoz hogy pontosan érjünk
a repülőtérre.
A legtöbb közlekedési út
optimalizáló algoritmus vektoros úthálózat rendszerrel dolgozik. Ebben a
szervezésben a hálózatot csomópontok és az azokat összekötő szakaszok vagy
összeköttetések alkotják.
Ha a forgalom nem befolyásolná az
utak áteresztő képességét, akkor ismerve a szakaszokon kifejthető maximális
sebességet valamint a szakaszok hosszát kiszámíthatnánk minden szakaszra az
áthaladási időt (vagy idő impedanciát) és a Dijsktra
algoritmussal meghatározhatnánk egy kiindulási ponttól valamennyi
csomópontig a legrövidebb utakat alkotó szakaszokat és a hozzájuk
tartozó menetidők utak szerinti összegét.
Úgy gondoljuk, hogy az algoritmus
alapelvét legegyszerűbben egy kis példán keresztül érthetjük meg, ezért
eltekintünk a formális megfogalmazástól - képleteket írni a WEB oldalra
különben sem egyszerű - és a következő 6.3 táblázatban lépésenként
illusztráljuk az algoritmus munkáját.
|
|
Ez a kiinduló gráf, a kezdő pont a D, a költségeket barna számok jelölik az élek
mellett. |
|
|
A nulladik lépésben az algoritmus meghatározza D távolságát
saját magától ami természetesen 0. Ezután 10-szer
megismétlődik a következő eljárás: |
|
|
első lépésben kiszámítjuk A, E, és J távolságát,
s mivel az utóbbi a legkisebb kijelöljük a DJ élet és J csúcspontot.
|
|
|
második lépésben megismételjük most már J-ről a vizsgálatot K-ra és
E-re, E-re 12-t kapunk, ez nagyobb mint a meglévő 7 ezért ezt nem
változtatjuk, K-ra 5-öt kapunk, ez a J csomópontról szomszédos legkisebb
csomóponti érték: bekékítjük. |
|
|
harmadik lépésben K-ról számoljuk E, F, G, L értékeit. E kivételével
a többi értéket pirossal beírjuk, E-nek pedig bekékítjük korábban kapott legkisebb értékét, mivel az összes rendelkezésre álló
érték közül ez a legkisebb. |
|
|
negyedik lépésünket értelem szerint E-ről kezdjük és
kiszámoljuk innen A, B, F értékeit. A-ra, F-re nagyobbat
kapunk mint korábban kaptunk ezért meghagyjuk régi értékét, B-re beírunk 9-et és
mivel a legkisebb érték három csúcson is 9,
bármelyiket választhatjuk a tovább haladáshoz, mi kékítsük be F-et azzal az éllel
amivel 9 kijött. |
|
|
ötödik lépésünkben F-ről B-t és G-t számítjuk, de
mivel nagyobbak a meglévőknél meghagyjuk a piros értékeket. A
legkisebb érték most 9 az A-n és B-n, kékítsük be A-t, a 9-et
produkáló DA éllel együtt. |
|
|
hatodik lépésben A-ból csak B-t tudjuk
meghatározni, de ez 18 lenne, tehát meghagyjuk B meglévő 9-ét és
mivel ez a legkisebb, bekékítjük a létrehozó EB éllel. |
|
|
hetedik lépésben B-ből kiszámoljuk C-t és G-t, G nagyobbra
adódik (18) a meglévő 11-nél ezért ezt meghagyjuk, C-hez pedig beírunk 14-et.
Mivel a hálózatban legkisebb még nem kék érték a G-n 11, azt bekékítjük a létrehozó KG éllel
együtt. |
|
|
nyolcadik lépésben G-ről számoljuk C, H és L értékét. H értékét 11 + 4 = 15 beírjuk, C és L nagyobbra
adódott a régi értékeknél, ezért azokat megtartjuk. Mivel a legkisebb még nem kék érték L ezt bekékítjük a létrehozó KL éllel
együtt. |
|
|
kilencedik lépés: L-ből kiszámoljuk H-t, de ez nagyobb a
meglévő értéknél ezért azt meghagyjuk, a legkisebb érték 14 a C-n ezért bekékítjük a létrehozó BC éllel
együtt. |
|
|
tizedik lépésben C-ről kiszámítottuk H-t, de nagyobb
lett a meglévő értéknél ezért azt meghagytuk. A legkisebb még nem kék érték H-nál 15, ezért
ezt bekékítjük a létrehozó GH éllel
együtt. A létrejött hálózat kék vonalai megadják D-től a kérdéses csúcsig a
legrövidebb topológiát, a csúcsok melletti számok pedig az út hosszát. Természetesen a „hossz”
csak választott mérőszám, mely lehet költség, idő, komfort, és más felhasználási tényező is. |
6.3 táblázat - egyszerű hálózati példa a Dijkstra algoritmus működésére
Mivel azonban az utak
telítettsége befolyásolja az útszakaszokon történő áthaladás idejét elvileg
minden időpillanatban más és más lehet az optimális út. A tárgyalt modell annak
a dinamikus forgalmi egyensúlyi helyzetnek a modellezésére vállalkozik, melyben
a résztvevő járművek útvonaluk megváltoztatásával már nem javíthatnak utazási
ráfordításukon (nem csökkenthetik a cél elérésére fordított időt).
A dinamikus forgalom
modellezésnél vizsgálhatjuk a forgalmi helyzetet az idő folyamatos
függvényeként vagy diszkrét időintervallumokban. A folyamatos idejű rendszerek
a forgalom áramlást a dinamikus rendszer optimális vezérlése megoldásának
tekintik. Ez a felfogás a jelentős számítási erőforrás mellett folyamatos idejű
forgalom monitorozást igényel bemenő adatként. Alkalmazása az intelligens
gépjármű navigációs rendszerekben indokolt a megfelelően kialakított figyelő
rendszer megléte esetén.
Az általunk ismertetett rendszer
gyakorlati szállítás szervezési alkalmazásokat kíván széleskörűen kiszolgálni,
ezért viszonylag egyszerű hardveren alkalmazható és az időfüggő terheléseket
forgalomszámlálások általánosítására támaszkodva határozza meg. Ezeket a
feltételeket az úgynevezett dinamikus felhasználó optimális
megközelítés (dynamic user optimal = DUO) biztosítja, mely időben diszkrét
dinamikus áramlási modell s mint ilyen elvileg tetszőleges felbontású idő-szakaszok
áramlási képét modellezi.
A DUO elv állítása szerint
hálózati egyensúly esetén egy, azonos időintervallumban elindult jármű sem
csökkentheti menetidejét útvonala egyoldalú megváltoztatásával. Amint látjuk
tehát az eredetileg kitűzött cél a megvalósított modellben annyiban módosult,
hogy az optimalitás az egy időintervallumban elindultakra korlátozódik.
A menetidő minimalizálási feladat
korlátozásai részben a hálózat topológiája és attribútumai részben az időbeni
Kezdőpont-Célpont (angolul O-D) mátrixok alapján írhatók fel. A mátrixoknak
rendelkezésre kell állniuk minden, általában 5-10 perces intervallumra a
vizsgálati időtartományban, mely naponta néhány órát jelent.
A modellező szoftver az adatokon
keresztül kapcsolódik a GIS szoftverhez. Az ismertetett kísérleti szoftverben a
modellező programot Visual C++ 5. verzióban írták, GIS szoftverként pedig az
Arc/Info 7.1.2. verzióját használták. A bemenő adatokat Arc/Info fedvényekként
(coverage) kell a GIS-ben létrehozni. Az úthálózatot olyan ARC típusú fedvény
képviseli, melyben a szakaszok (ezt hívják arc-nak vagy link-nek) rendelkeznek
azokkal az attribútumokkal, melyek a szakasz menetideje meghatározásához
szükségesek például a következő képlet felhasználásával:
T = T0·[1 + a1·(Q / CS)a2], (6.2)
ahol:
T = a szakasz megtételéhez szükséges utazási idő;
T0 = a szakasz megtételéhez szükséges utazási idő szabad
áramlás esetén;
Q = szakasz áramlási arányszám gépkocsik száma / időintervallum;
CS = a szakasz stabil állapotú kapacitása (gépkocsi szám / időintervallum)-ban
kifejezve;
a1, a2 = empirikus paraméterek.
Az empirikus paramétereket
városonként érdemes meghatározni. Csak példaként mutatjuk be a1 és a2 értékeit a kanadai Winnipeg városára:
|
megengedett sebesség (mérföld/óra) |
a1 |
a2 |
|
0 - 30 |
1.50 |
4.42 |
|
31 - 40 |
1.03 |
5.52 |
|
41- 50 |
1.01 |
6.59 |
|
50+ |
1.15 |
6.87 |
6.4 táblázat - tapasztalati paraméterek a menetidő képlethez a kanadai
Winnipegből
A kezdőpont-cél mátrixokat POINT
(pont) típusú fedvények formájában szintén a GIS-ben kell létrehozni. Minden
kezdő és cél ponthoz a koordinátákon kívül valamennyi olyan pont megnevezése is
tartozik az attribútum táblázatban, ahova a kérdéses pontból útvonalak indulnak
ki. Fontos megemlíteni, hogy ezek a mátrixok minden intervallumra (5-10 perc)
külön készülnek. Ha a városi hatóságok a forgalom számlálások során rögzítik az
indulási időt és a célt, úgy a mátrixok létrehozásának semmi elvi akadálya
sincs. Ha azonban a K-C értékek csak egész napra összesítve állnak
rendelkezésünkre, úgy azok lebontására rendszerint a napi áramlási profil
görbét használják, a diszaggregálás részleteire itt nem térünk ki.
A modellező szoftver az
attribútumokat tartalmazó INFO fájlokat olvassa, illetve a vizsgálat
eredményeit új INFO fájlokba írja, minden vizsgált időintervallumról egy új
fájl készül. Ezek a fájlok megjeleníthetők és elemezhetők az Arc/Info-ban. Ha
megadjuk a kezdő és végpontot valamint az indulási időt a GIS függvény a
modellező program által gyártott INFO fájl felhasználásával kiszámítja a
menetidőt és megrajzolja az optimális utat. Ezzel a módszerrel csak iterációval
lehet meghatározni a szükséges indulási időpontot. A szoftver tovább
fejlesztése során olyan eljárást is ki akarnak dolgozni, mely explicit módon
megadja, hogy mikor kell elindulni adott érkezési időponthoz.
A modellező program működését a
6.19 ábrán bemutatott folyamatábrával szemléltetjük.
|
|
6.19 ábra - a DTA forgalom modellező szoftver folyamat ábrája
|
Amint a folyamat ábrából is
látható az inicializálás után a program kiválaszt egy kiinduló pontot és
megbecsüli az innen kiinduló szakaszokon a forgalom áramlás értékét a korábbi és
jelenlegi intervallumban már kijelölt terhelések alapján. Ezután kiszámítja a
szakaszok idő impedanciáját és meghatározza a kérdéses kiinduló pontból az
összes célpontba vezető legrövidebb utat a Dijkstra algoritmussal.
Ezután megvizsgálja, hogy a kérdéses csomópontból induló útvonalak mely
szakaszokat mikorra és mennyire terhelik és így kialakítja a jelenlegi és jövőben
megvalósuló áramlási képet. Végig haladva az összes kiinduló ponton valamennyi
útvonalra elvégzi a szakaszokhoz történő terhelés hozzárendelést. A célból hogy
e hozzárendelés ne véletlenszerűen következzen be egy kezdőpontról egy időintervallumban
kiinduló útvonalak kiválasztásakor az útvonalakat a program NTREES (egész szám,
a kísérletben az értéke 3 volt) részre osztja és ezeket a részeket rendeli az
ugyancsak NTREES számú legrövidebb út fa egyikéhez. Ezt a ciklust kell ezután
minden kiindulópontra és minden időintervallumra megismételni.
Mielőtt bemutatnánk az első
eredményeket ábrázoló képeket megjegyezzük, hogy a szerzők kifejtették az
irányú eltökéltségüket, hogy létrehozzák a rendszer GIS-szel szorosan
összekapcsolt változatát, valamint, hogy elkövetkező fejlesztésükben szabatos
optimalizáló algoritmust alkalmaznak, mivel a jelenlegi algoritmus szerény
környezet igényének az az ára, hogy csak közelítő optimumot szolgáltat.
|
|
6.20 ábra - Salt Lake City úthálózat torlódási mintája az 1. időintervallumban,
a piros szín jelzi a torlódásokat, fekete a normális forgalmat
|
|
|
6.21 ábra - Salt Lake City úthálózat torlódási mintája az 13. időintervallumban,
a piros szín jelzi a torlódásokat, fekete a normális forgalmat
|
|
|
6.22 ábra - legrövidebb utazási idejű útvonalak az 1. (zöld vonal) és 13.
(kék vonal) időintervallumban
|
Összetett rendszerekkel
realizált döntéstámogató rendszerek
Az IDLAMS (The Integrated
Dynamic Landscape Analyzis and Modeling System = Integrált Dinamikus Táj-Elemző
és Modellező Rendszer) és OO-IDLAMS (OO = Objektum Orientált) Rendszer [6].
Az IDLAMS katonai megrendelésre
készült, kidolgozásában az Argonne Nemzeti Kutató
Laboratóriumon kívül még részt vet az USA Hadsereg
ERDC-CERL rövidítésű kutató-fejlesztő központja is.
A rendszer alapvető feladata az
volt, hogy segítsen olyan döntéseket hozni, melyek maximalizálják a hadsereg
gyakorló terepeinek kihasználtságát, de emellett gondoskodnak arról is, hogy az
ökológiai egyensúly a kérdéses gyakorló terepeken és környékükön ne boruljon
fel.
Az IDLAMS kidolgozását 1994-ben
kezdték. Abból indultak ki, hogy GIS DSS generátorral kapcsolják össze a növényzet
dinamikai , erózió, vadon élő állatok lakóhely
alkalmassági modelljeit a kiértékelő-optimalizáló
modullal. A rendszer architektúráját a 6.23 ábrán vázoljuk fel. Meg kell
említeni, hogy több napos irodalom búvárkodás eredményeképpen sem sikerült kideríteni,
hogy milyen GIS-t használ a rendszer. Egy web-lap töredéken arra találtam
utalást, hogy telepítéskor azt a raszteres GIS-t kell alkalmazni, mely az
intézménynél jelenleg is üzemel. Ebből arra a következtetésre jutottam, hogy a
rendszerben a GIS szervező szerepe a térbeli adatokon keresztül realizálódik,
olymódon, hogy az IDLAMS főmodulja (a vegetációs modul) több GIS formátumot is
elfogad illetve generál.
|
|
6.23 ábra - az IDLAMS rendszer diagramja
|
A rendszer főmodulja meghatározza
azokat a növényzet változásokat, melyek a természeti folyamat, a földhasználat
változás illetve a föld kezelésével kapcsolatos műveletek eredményei. A modul
által generált térképek képezik a bemenetet a többi modul számára. Az élőlények
lakókörzetének alkalmasságát vizsgáló modul az USA Halászati és Vadon
Élő Állatok Szolgálatának alkalmassági indexeit alkalmazza a bemenő, tényleges
állapotot tükröző vagy szimulált felszínborítást/növényzetet ábrázoló
rétegekre. Bizonyos állatfajok kiegészítő bemeneti térképeket is igényelhetnek.
Az eróziós modellnek a valós vagy szimulált
növényzeti/felszínborítási rétegeken kívül más olyan térbeli adat rétegekre is
szüksége van, melyek befolyásolják az eróziót. Az ökológiai modelleket a forgatókönyv
kiértékelő modul kapcsolja az üzemeltető igényeihez. Ez a modul
valósítja meg interaktív módon az alkalmazási variánsok között a
kompromisszumot.
Az IDLAMS-szal végzett döntés-előkészítések
alapján 1998-ban meghatározták a rendszer továbbfejlesztésének főbb
követelményeit:
- Adaptívabb és rugalmasabb mechanizmusra van
szükség a szétszórtan működő alkalmazói szoftverek integrálására;
- Fokozottabban kell tudni figyelembe venni az
ökoszisztéma, földhasználat, és földkezelési gyakorlat dinamikáját;
- Támogatni kell az olyan szoftver
alkalmazásokat, melyek többszörös térbeli és időbeli skálán képesek
dolgozni;
- Csökkenteni kell a modellezési technológia
hosszú távú költségeit a meglévő adatok, modellek, rendszer komponensek
ismételt felhasználásával.
A kitűzött cél megvalósítását úgy
kívánták elérni, hogy az IDLAMS rendszert az objektum orientált DIAS keret rendszerbe integrálták.
Mivel az OO IDLAMS célja elsősorban
az objektum orientált keretszoftver hasznosságának igazolása nem pedig egy
komplett döntés támogató rendszer felépítése volt, ezért az eredeti IDLAMS
moduloknak csak egy részét vitték át az új rendszerbe, mégpedig a Növényzeti
Dinamika Modellt és a Henslow féle veréb lakóhely modellt. Figyelembe véve a
DIAS lehetőségeit, a katonai gyakorlatra és földhasználatra vonatkozó akció
komponenseket, melyek korábban a növényzeti modell részei voltak kivették ebből
a modellből és úgy nevezett akció objektumokként (COA) implementálták a
DIAS-ban. A COA objektum úgy tekinthető, mint egy procedurális vagy
szekvenciális folyamat folyamat-ábrája. Mind a három egyszerű, a prototípusban
realizált akció objektum: a "gyakorlatozik", az "éget" és
az "ültet" procedurális jellegű és könnyen implementálható a
DIAS-ban.
Az OO-IDLAMS entitás objektumai
tartalmazzák azokat az állapot változókat, melyek a modell együttes be-, és
kimeneti paramétereit képviselik. Hasonlóképpen ezekbe az objektumokba helyeződnek
el a modell együttes által implementált "viselkedés" formák
(tulajdonképpen, hagyományos kifejezéssel eljárás hívások).
Az új verzió illusztrálását
tartalmazza a 6.24 ábra.
|
|
6.24 ábra - az OO-IDLAMS prototípus architektúrája
|
A GIS funkciókat a DIAS-szal
kapcsolatban már említett Geo Viewer nevű objektum orientált GIS modul
realizálja. Ezzel a modullal lehet navigálni a vizsgálati területen, lekérdezéseket
kezdeményezni, objektumokat manipulálni, új nézeteket nyitni, stb. A
szimulációk során megjeleníthetők a különböző időpontoknak megfelelő kimeneti
paraméterek. A 6.25 ábra négy külön nézetben jelentkező paramétere: a
felszínborítás, földhasználati beosztás, beültetett területek és a veréb
számára alkalmas lakóterület.
|
|
6.25 ábra - az OO-IDLAMS földrajzi megjelenítése a GIS modullal
|
A DIAS architektúra két előnyére
is érdemes felhívni a figyelmet. Az entitás objektumokban elhelyezett
viselkedés formák a külső modellek eljárásait aktiválják. Például a
Felszínborítás objektum "implementáld a természetes folyamatot"
nevű viselkedése meghívja a természetes növény változási folyamatot a Növényzet
Dinamikai Modellből, hasonlóképpen az "implementáld az erdő terjedési
folyamatot" nevű viselkedés az erdő terjedési rutint indítja el
ugyanebből a modellből. Ha azonban más algoritmussal akarjuk modellezni a
kérdéses folyamatokat úgy új külső modellt illeszthetünk a DIAS kerethez
anélkül, hogy a program többi részét, a többi modellekkel fennálló
kapcsolatokat meg kellene változtatnunk. Természetesen, ha az új modell más
input/output paraméterekkel rendelkezik, úgy a megfelelő entitás objektum
paraméter rendszerét át kell alakítanunk. Az első előny tehát az új külső modellek
csatlakoztatási lehetősége a rendszer egyéb részeinek változatlanul hagyásával.
A másik előny a
modellek közötti futás idejű visszacsatolás lehetősége. A kialakított prototípusban ilyen
visszacsatolásra a Henslow féle Veréb Lakóhely Modell és a Föld Használat Terv
Objektum által meghívott Telepít akció folyamat között
lehetséges. A Henslow féle Veréb Lakóhely Modell akkor minősíti a különben
megkívánt növényzettel borított foltokat kiválónak, ha legalább 65 ha
méretűek. Ha a kapott foltok környezetében őshonos növényzetet telepítünk,
kielégítve a megkívánt területi feltételt, úgy jelentősen segítjük az állatfaj
életkörülményeit. A visszacsatolás úgy realizálódik, hogy minden idő lépésben
az Ültet akció folyamat lekérdezi a Henslow féle Veréb Objektum foltok
és kiegészítő hektárok kellenek nevű attribútumának aktuális értékét.
Ez meghívja a Henslow féle Veréb Lakóhely Modell-nek azt a folyamatát mely
kiváló tulajdonságú lakóhely foltokat alakít ki. Az Ültet akció folyamat
megvizsgálja, hogy találhatók-e a kiválasztott foltok mellett károsított füves
területek, melyeken a fű újra telepíthető a területi korlátozás igényeinek
megfelelően. Ha a lehetőség fennáll, úgy a rendszer kialakítja a 65 hektáros
foltokat és kijelöli a füvesítendő részeket. A visszacsatolás folyamatát a 6.26
ábra illusztrálja.
|
|
6.26 ábra - modellek közötti dinamikus visszacsatolás az OO-IDLAMS-ban
|
Az OO-IDLAMS példája jól
bizonyítja, hogy a korszerű modellező és döntéstámogató rendszereket objektum
orientált technológián alapuló keretszoftverekre támaszkodva célszerű megvalósítani.
Integrált Tervezési
Döntéstámogató rendszer (IPDSS) [7]
Az Integrált Tervezési
Döntéstámogató Rendszer IPDSS, geológiai, környezeti veszélyek
figyelembevételére és az ennek megfelelő földhasználat tervezés támogatására
készült Colorádó Állam Egyetemén 1994-ben. A kor követelményeinek megfelelően a
rendszer önálló szoftvereket kapcsol az adatok segítségével össze és tesz
elérhetővé a szabványos elemekből felépített grafikus felhasználói interfészen
keresztül. A rendszer fő interfész kezelő ablakát a 6.27 ábrán mutatjuk be.
|
|
6.27 ábra - az IPDSS rendszer fő interfész kezelő ablaka
|
Az IPDSS főbb részei (6.28 ábra):
- Az Adatkezelő Rendszer (DMS), feladata az
adat gyűjtés, transzformáció, megjelenítés. GIS eszközöket igényel ezért a
feladatra az ingyenes és C nyelven fejleszthető GRASS GIS-t alkalmazták a
rendszer megalkotói. A DMS lényegében olyan intelligens könyvtár mely
rengeteg vészhelyzet vonatkozású elemző adatot tárol.
- A Modell Kezelő Rendszer (MMS) adatelemző
modelleket kezel, emulálja a folyó elemző eljárást, numerikusan modellez
és eredményeket szolgáltat.
- A GUI, melyet szabványos UNIX elemekből
(X-Windows, OSF/Motif) állítottak össze ablak, menü, ikon és párbeszéd
ablak vezérelt.
Ha új
modellező programot akarunk kapcsolatba hozni a GIS által kezelt és
megjelenített adatokkal úgy a két szoftver között kapcsoló programot kel írni.
Ezt a feladatot teljesíti a GUI részét képező "C" programozó
interfész, mely segítségével dinamikus kapcsolat biztosítható az MMS modellektől
a DMS-hez, úgy hogy a GIS mint adatbázis forrás szerepel a vezérlő program
felé.
|
|
6.28 ábra - az IPDSS rendszer fő alkotó elemei
|
A rendszer eredeti kiépítésében a
geológiai jellegű veszélyforrások modellezésére, a veszélyforrásokkal szembeni
emberi és anyagi sebezhetőség értékelésére és a fentieket figyelembe vevő
többkritériumos földhasználati tervezésre készült.
A témához felhasznált adatok
többek közt: a topográfia, lejtőirány, mély és felszíni geológia, strukturális
geológia, geomorfológia, talajok (geotechnikai adatok), felszínborítás,
földhasználat, hidrológia, szociológia, csapadék (éves átlag és várható
maximum), áradási térképek, és történelmi adatok a veszélybecslésre.
A megbecsülendő veszélyek:
sárfolyások, süllyedés, esetleges egyéb veszélyek a maximális várható csapadék
és szeizmicitás hatására.
A sebezhetőségi vizsgálatok:
- az ökoszisztéma érzékenységére,
- a gazdasági sebezhetőségre és
- a szociális infrastruktúra sebezhetőségére
vonatkoznak.
A kiértékelési-tervezési munka
során a felhasználó
- megegyezésre jut a tervezési döntéshozásban
figyelembe veendő kritériumokról;
- adatokat gyűjt a kritériumra és a GIS-szel
adatbázist épít;
- elméleti és történelmi információk alapján
módosítja az inputot;
- kiszámolja és kategorizálja az összes
korlátozást, beleértve a trigger (kirobbantó) feltételeket is;
- támogatja az algoritmusok megvitatását.
A továbbiakban villantsuk fel
egy-két vonással és ábrával a rendszer néhány fontos tulajdonságát.
A rendszer, hála az alkalmazott
GRASS GIS-nek kiváló térinformatikai képességekkel rendelkezik (6.29 ábra):
- alkalmas raszter és vektor térképek,
kompozitok megjelenítésére;
- térkép kombinációk létrehozására mivel az
IPDSS-nek overlay editora van a kombinációk végrehajtására,
melyek használhatók a forgatókönyvekben;
- a Cross-Product Editor
megakadályozza az olyan szerkesztéseket, melyek konfliktust hoznak létre a
kezelési célokkal;
- ezen kívül funkciói közé tartozik még a
területszámítás, zoom, szerkesztés és a légifénykép elemzés.
|
|
6.29 ábra - magassági raszter térkép átfedve a közlekedési útvonalak
vektor fedvényével és a légi és földi fényképek helyeivel
|
Az IPDSS-t színes SUN/SPARC-munkaállomáson
implementálták, UNIX operációs rendszer és X Window System alatt.
A rendszer első funkciója a
veszély források becslése. Az alap kiépítés a süllyedések és sárfolyások
becslésére alkalmas, de más kockázat becslő modellek, például áradás,
sziklaomlás, földcsuszamlás is kezelhető ugyanezzel az interfésszel.
A bemenő adatok a következők:
- Fogékonyság, melyet fizikai faktorok
kombinációja determinál, olyanok mint a domborzat, felszíni geológia,
tektonika, geomorfológia, talaj típus, geotechnika, növényzet,
földhasználat és felszín borítás, hidrológia, szociológia, stb.
- Kirobbantó (angolul trigger =
ravasz) faktorok, melyek a szeizmikusság, csapadék és földhasználat kombinációjából
adódnak .
Minden faktornak kiszámolják a
befolyási indexét minden helyre egy specifikus súllyal. Ezeknek az értékeknek a
szorzásával és összegzésével meghatározzák a relatív veszélyt:
VESZÉLY = VESZÉLY_FOGÉKONYSÉG*TRIGGER(T)
Ezért a sárfolyás veszélye (Hdf)
nem más mint a sárfolyás veszély fogékonyság (Sdf) megszorozva a trigger
faktorokkal, mely vagy a csapadék (Tdf_p), szeizmikusság (Tdf_s),
vagy a kettő kombinációja (Tdf_ps).
Hdf = Sdf*[Tdf_p | Tdf_s | Tdf_ps] (6.3)
A veszély fogékonyságot befolyásoló
természeti tényezők mérnöki tevékenységgel módosíthatók a terepen. A
módosítások súlyozva vihetők be a rendszerbe. A 6.30 ábrán az érzékenységet
mint a befolyásoló faktorok súlyozott összegét láthatjuk, mely interaktívan
módosítható.
|
|
6.30 ábra - veszély fogékonyság szerkeszthető algoritmusa
|
Sdf = ((slopedf * (aspect*7 + usc_casag*4 + sgmdf*9 +
veg*8 + hgdf*5 + shrswell1*2 + erosK*7 + lusess*3 + wsbuf1*8 + femahist2*10 +
isohyaa*4)/67) +
9)/10 (6.4)
A képletben szereplő változók az
alábbi faktorok valamely értékéhez rendelt osztályzatok (részletes
meghatározásukat, és hogy milyen értéknél milyen osztályzatot kapnak az érdeklődők
megtalálják [7]-ben):
- slopdf - lejtő szög,
- aspect - lejtő irány,
- usc_casag - kőzet mállás,
- sgmdf - a lejtőt borító geológiai képződmény
folyás érzékenysége,
- veg - növényborítási index,
- hgdf - hidrológiai talajcsoport,
- shrswell - agyagtartalom,
- erosK - talajeróziós potenciál,
- lusses - földhasználat zónák,
- femahist2 - történelmi sárfolyások,
- isohyaa - csapadék.
A wsbuf1 jelentése nem szerepel a cikkben, valószínűleg valamilyen védő-övezettől
függő érték.
Az IPDSS interfész úgy készült,
hogy a felhasználó a trigger faktorokat közvetlenül a "Hazard"
lehúzós menüben alkalmazhatja a kérdéses veszélyre kattintva.
Az eredmény interaktívan nyerhető,
a használót érdeklő gomb megnyomásával (pld. "Debris Flow Hazard" azaz
sárfolyás az eső (PMP) és szeizmikusság trigger faktorokkal) mely aktiválja a
panel bal oldalán beírt képlettel kifejezett modellt (6.31 ábra).
|
|
6.31 ábra - lehúzható "veszély" menü a trigger faktorokkal
|
A sebezhetőség algoritmusa
a befolyásoló tényezők és a szociális jellemzők válaszának relatív
értékelésével készül.
A földhasználati sebezhetőség (luseV)
értékelése a települési infrastruktúra (épület típus és anyagok, gazdasági
zónák), városi infrastruktúra (csatornázás, védekezési építő munkák), szociális
infrastruktúra (kulturális feltételek) figyelembe vételével készül.
A lakók sűrűsége (human_density) a népszámlálási tömb/ember adaton illetve
az elemzés minimális cella méretén alapul.
A fő kommunikációk (lifelines) faktora figyelembe veszi a vonalak köré
vont védőövezeteket.
vulnerability = (human_density*10 +
luseV*7 + lifelines*2)/19 (6.5)
Az IPDS a „sebezhetőség”
("Vulnerability") lehúzható menüvel biztosítja, hogy a
felhasználó módosítsa a sebezhetőségi meggondolásokat, beszúrva a véleményét az
új algoritmusba, mely képes számolni a városi infrastruktúra, települési
infrastruktúra és kulturális infrastruktúra sebezhetőségének kombinációját
(6.32 ábra).
|
|
6.32 ábra - lehúzható "sebezhetőség" menü
|
A kockázatbecslés a
legfontosabb célja a városi tervezési döntéseknek, mivel magába foglalja az
emberek és városi infrastruktúra sebezhetőségét valamely esemény előfordulásának
valószínűsége alapján.
A lakókörnyezetre vonatkozó kockázati információ különösen komplett eszköze a kockázati
övezet térkép.
A specifikus kockázati (Rei) övezetesítés olyan eljárás, mely zónákra
bontja a régiót valamely specifikus veszélyforrásnak (sárfolyás, áradás,
sziklaomlás, süllyedés) való kitettség (Hi) szempontjából.
A térkép jelentősége abban van, hogy segítségével megítélhető a jövőben várható
veszélyek helye, valószínűsége, és relatív komolysága ezzel a potenciális
veszteségek megbecsülhetők illetve megfelelő intézkedésekkel csökkenthetők vagy
elkerülhetők.
Rei = f(Hi, Ve). (6.6)
A kockázati övezetek célja a
tervezési folyamatban:
- az okozó tényezők redukálása,
- a sebezhetőség redukálása és
- a fizikai, gazdasági, mentális károsodás
csökkentése.
A "Risk" lehúzós menü
lehetővé teszi azon potenciális károk földrajzi eloszlásának szelektív
kiértékelését, melyek károsíthatják azokat a szociális jellemzőket, melyeket a
felhasználó különböző veszély fajta sebezhetőségi számításánál választ (6.33
ábra).
|
|
6.33 ábra - lehúzható "kockázati" menü a kockázati
forgatókönyvek szelektív becslésére.
|
A LADSS (Land
Allocation Decision Support System = Föld Hozzárendelési Döntés Támogató
Rendszer) rendszer
A rendszert a Skócia-i Macaulay
Földhasználati Kutató Intézet fejlesztette ki a falusi földhasználat tervezés
támogatására [8]. A multidő talán nem
teljesen helyes mivel a rendszer kipróbálása és továbbfejlesztése jelenleg is
folyamatban van.
A rendszer ismertetésével elsődlegesen
az a célunk, hogy betekintést nyerjünk egy eredeti optimalizálási eljárás
együttes - a genetikus algoritmusok világába is.
Amint már erről többször
szóltunk, a GIS és az optimalizáló szoftver kapcsolata alapulhat a közös adat
formátumon (ilyen rendszer volt például a szabatos szállítási időpont
meghatározását végző közlekedési rendszer), amikor a lényegében különálló
szoftverek ugyanazokat a fájlokat írják és olvassák, vagy lehetnek teljesen
integráltak mint a DIAS alkalmazások.
A LADSS közbenső utat választott:
az optimalizáló-tervező program modulok és a GIS mint különálló programok egy
szekvenciális adatátvitelt és távoli rutin hívást realizáló "BRIDGE"
(HÍD) nevű szoftvermodul segítségével kapcsolódnak egymáshoz, de közös grafikus
felhasználói interfésszel rendelkeznek. Már itt megjegyezzük, hogy mind a HÍD,
mind a GUI, mind az optimalizáló rendszer a G2 nevű fejlesztő
környezetében került kialakításra. A rendszer komponenseit a 6.34 ábrán mutatjuk
be, mely a már hivatkozott [8] cikkre
támaszkodva készült.
|
|
6.34 ábra - a LADSS komponensei
|
A rendszer GIS komponenseként az
objektum orientált Smallworld
GIS-t alkalmazták a rendszer tervezői. Bár ez a rendszer nálunk nem nagyon
ismert, a megadott linkből kiderül, hogy széleskörűen alkalmazzák közmű
információs rendszerek kiépítésére.
A földhasználati
döntésekhez szükséges térbeli adatstruktúra négy hierarchikusan egymásba
ágyazott, különböző feldolgozási méretaránynak megfelelő objektum osztályt
definiál:
- az üzem szintű osztály az alapja az egész gazdaság
auditálásának az üzemelési feltételek elemzése alapján. Ez a méretarány
teszi lehetővé a művelési egységek költségvetési táblázatainak
vizsgálatát, a szükséges munkaerő felhasználás elemzését valamint a művelési
ágak hatásának figyelembe vételét az egész gazdaság talajkonzervációs
értékére;
- a táblák az azonos művelésű terület egységek,
melyekhez a földhasználatot a tervezési eszközök hozzárendelik;
- a tábla részlet a táblának biológiai, fizikai, talajtani
szempontból még homogénnek tekinthető része;
- a tábla részlet poligon a tábla részlet geometriai leírása.
A rendszer térbeli adatmodellje
tehát, ellentétben a legtöbb földhasználat modellező szoftverrel, nem
raszteres, hanem tulajdonképpen vektoros, ami pontosság szempontjából mindenképpen
kompromisszumokra kényszeríti a szoftver használóit. Ez a kompromisszum akkor
indokolt, ha összhangba hozható a tényleges adatnyerési pontossággal. Érdemes
megemlíteni, hogy maga az objektum orientáltság nem határozza meg, hogy
vektoros vagy raszteres-e a koncepcionális térbeli adatmodell, csak az
implementációs modellt definiálja. A legújabb irodalomban [9] részletes leírást találhatunk arra, hogy
miként implementálják objektumként a raszter cellát.
Visszatérve a tábla részletek
attribútumaira, az eredeti térbeli adatok (topográfia, talaj jellemzők, stb.)
mint rács pontok kerülnek rögzítésre a rendszerben. A tervezési feladatok
végrehajtásakor a tervezési modulok megkerestetik a GIS-szel a tábla részletekbe
eső adatpontokat és a tábla részlet attribútumait a beeső pontok
attribútumainak átlagolásával határozzák meg. A módszer előnye, hogy ily módon
az adatok frissítése, vagy új adatforrások (pld. gyakorlati szakemberek
tapasztalatai) bevonása csak új pontok bevitelét vagy a régi pontok módosítását
igényli, de nincs szükség az objektum attribútumok átírására, mivel azt a
kiértékelés során maga a program végzi.
A térbeli objektumok a GIS
mellett részleges tükrözéssel a feldolgozó-optimalizáló Tudás Alapú Rendszerben
(TAR) is tárolásra kerülnek. Erre az ismételt tárolásra elvileg nem volna
szükség, elég volna az objektumok neveit a TAR-ban rögzíteni és a szükséges
attribútumokat a GIS-ből lekérni, ha a két rendszer közötti kommunikáció
gyorsabb és megbízhatóbb lenne. Úgy látszik azonban hogy a GIS és TAR közötti
HÍD (BRIDGE) szoftver ezekkel a jellemzőkkel nem rendelkezik ezért a részbeni
duplikált tárolás indokolt lehet. A rendszer adatstruktúráját a 6.35 ábrán
vázoltuk fel.
|
|
6.35 ábra - a LADSS adatstruktúrája
|
A földhasználati modulokat tavaszi árpára, réten tartott felföldi birkára és tejtermelő tehénre, öt
lombos és két tűlevelű fa fajtára dolgozták ki. Valamennyi esetben a modulokat
procedurális szoftverként a Gensym
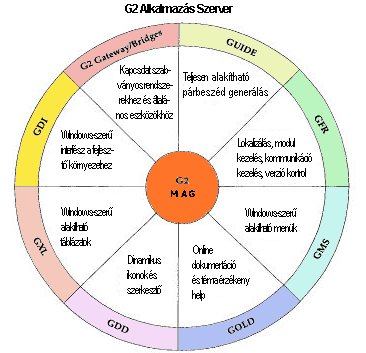
cég G2 nevű tudás alapú fejlesztő környezetében dolgozták ki. A G2
rendszerrel kapcsolatban megemlítjük, hogy objektum orientált rendszerről van
szó, mely lehetővé teszi, hogy a fejlesztők a tudást objektumok, szabályok,
módszerek és eljárások segítségével reprezentálják grafika és strukturált
természetes nyelv felhasználásával. A G2 segédprogramjai (6.36 ábra)
többek közt lehetővé teszik a már többször hivatkozott HÍD programok vagy
felhasználói interfészek egyszerű elkészítését.
|
|
6.35 ábra - a G2 segédprogramjai
|
A földhasználati modulok
publikált modellek alapján valamennyi földhasználat esetén hasonlóan működnek.
Először meghatározzák a kérdéses táblarészlet alkalmasságát a kérdéses
földhasználatra. Az ehhez szükséges attribútum adatokat, amint már említettük,
a GIS-ből veszik. Ezután, ha a terület alkalmas meghatározzák a produktivitást
(tonna/ha a gabonára, maximális állatsűrűség a téli takarmány figyelembe
vételével, köbméter/ha a fa fajták esetén) az agronómus által megadott művelési
rendszernek megfelelően. Végül kiszámolják a földhasználat jövedelmezőségét a
globális paraméterekként megadott árak függvényében. A fenti vizsgálatok tábla
részlet szinten történnek, és az eredmények jelentős része bemenő adatként
jelentkezik a hatás elemzéshez.
A hatás elemző modulok a gazdasági, szociális és természeti hatások vizsgálatát
hajtják végre. A legjobban kidolgozott gazdasági modul a földhasználati modulok
outputjából (a hektáronkénti nyereségből = bevétel - kiadás a munkabér és tőke
költség figyelembe vétele nélkül) kiszámolja a művelési egység "nettó
jelenlegi értékét", figyelembe véve az esetleges jutalmakat és
szubvenciókat (a felhasználó által meghatározott időbeli széthúzással). A
szociális behatást kezelő komponens elsősorban a foglalkoztatás nagyságát,
típusát és időbeli eloszlását méri, a környezeti indexeket pedig most készülnek
kifejleszteni a GIS-ben, elsőként olyan táj morfológiai mutatókat sorát
számolva mint például a kerület/terület arányok.
A grafikus felhasználói
interfészt a G2
környezet segédprogramjai segítségével alakították ki, ez azonban nem
akadályozza, hogy az interfészből, tehát a G2-ből a HID-on keresztül
küldött módszer hívással manipuláljuk például a GIS felhasználói menü
rendszerét.
A földhasználati
tervezési eszközök
lehetővé teszik, hogy a gazdaságok irányítói bevigyék a rendszerbe a cél(oka)t,
azaz, hogy mely hatás elemző modul(oaka)t jelölnek meg az optimalizálás
alapjául, továbbá a globális, üzemi és pénzügyi paramétereket (pld. a
szubvenciót az árpa termelésre), a rendszer pedig megkeresi, hogy a táblákon
optimális esetben milyen földhasználat legyen. A többes számot azért tettem
zárójelbe, mivel a rendszer elvileg több cél alapján is képes keresni, a
hivatkozott cikk illetve WEB lap azonban részletesebben csak az egy cél
szerinti kereséssel foglalkozik. Ezért a továbbiakban mi is ezt nézzük meg
részletesebben és tárgyalásunk végén térünk rá a több cél szerinti optimum
keresés néhány specifikumára.
A rendszer optimalizálásra a
Genetikus Algoritmust (GA) használja, s mivel ez a technika nem túl régi, s
egyben nagyon sok területen eredményesebben használható a hagyományos
technikáknál érdemes lesz az alapelvével röviden megismerkednünk. Az érdeklődők
figyelmét felhívjuk Marek Obitko cseh egyetemi hallgató 1998-ban
készült angol nyelvű
oktató anyagára, mely a témát röviden és világosan foglalja össze, s e
mellett JAVA appletekkel demonstrálja az algoritmus működését. Megjegyezzük
még, hogy néhány ábránkat a hivatkozott anyagból magyarítottuk.
A Genetikus Algoritmus (GA) az élővilág Darwin által fölfedezett
törzsfejlődését modellezi. A megoldandó problémákat a módszer vektorokként
modellezi. Egy véletlen vektor populációt (egyszerűbben bizonyos számú véletlen
vektort) kell létrehozni, és összehasonlítani a problémával. Az összehasonlítás
eredményeképpen a vektoroknak jósági értéket kell adni annak megfelelően, hogy
milyen jól oldják meg a problémát. Ezután a rossz (alacsony jósági számú)
vektorokat törlik az állományból és a maradékból új állományt hoznak létre a
reprodukció keresztezés és mutáció műveleteivel. A folyamat mindaddig
folytatódik amíg a megadott jósági szintet el nem érjük, illetve amíg egy
meghatározott lépésszámban sem lehet jobb vektort létrehozni.
A témával kapcsolatban gyakran
használt Genetikus Programozás olyan genetikus algoritmus, mely vektorokként kifejezésekből
álló fákat használ. A kifejezésekből álló fákat arra használja, hogy
egyenletet fejlesszen ki a probléma megoldására. A Genetikus Programozás
gyakran használja a LISP programozási nyelvet, mivel ebben a nyelvben
igen egyszerű a kifejezésekből álló fák felírása. E kis kitérő után folytassuk
a genetikus algoritmus tárgyalását, mivel a LADSS ezt és nem a GP-t használja
az optimalizálási feladat megoldására.
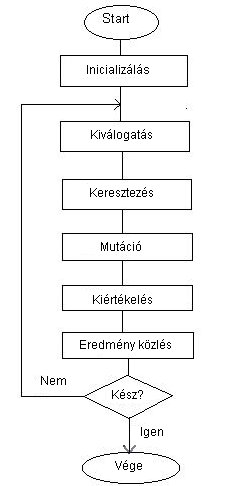
|
A
folyamatábránál kissé részletesebben szövegben kifejtve a genetikus algoritmus a következő lépésekből áll:
|
|
A populáció n kromoszómából
áll, míg a kromoszómák vektorok lévén elemekből, melyeket géneknek
hívunk. A gének rendszerint nem maguk a lehetséges megoldás vektorok, hanem
azoknak a konkrét feladattól függő kódjai. A lényeg az, hogy a gének lehetőleg
egyszerűen legyenek kezelhetők, de ennek ellenére alkalmasak legyenek az
általuk reprezentált megoldás vektorok jósági értékeinek kiszámítására.
A populációban lévő kromoszómák
számát a működő rendszerek 20-100 között szokták megválasztani (a nagyobb szám
finomabb felbontást de lassabb működést eredményezhet).
A kromoszómák kódolására a következő főbb sémákat alkalmazzák:
- bináris kódolás esetén a gének a 0 vagy 1 értékeit
vehetik fel, azaz például a következőképpen nézhet ki egy kromoszóma:
|
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
- a permutációs kódolás azt jelenti, hogy a kromoszómát
olyan számokból álló sztring alkotja, mely kifejezi a kérdéses számok
egymásutánját valamely rendezési folyamatban. Például, ha a gének olyan
útszakaszokat jelentenek, melyek összekapcsolnak két kijelölt pontot, úgy
a
|
4 |
7 |
10 |
5 |
3 |
2 |
1 |
8 |
9 |
6 |
- kromoszóma azt jelenti hogy az általa
képviselt megoldásban először a négy sorszámú útszakaszon kell
végigmennünk, utána a hét sorszámún, a tíz sorszámún, stb.
- Az érték szerinti kódolás esetén a gének a keresési térben lévő
megoldás vektorok elemeinek értékeit veszik fel, melyek számok vagy
karakterek lehetnek. Ha például a szóba jöhető földhasználatokat az abc
kis betűivel jelöljük, a gének sorszámát (a vektor elemek indexét) pedig a
táblákhoz kapcsoljuk, akkor a
|
b |
a |
c |
d |
f |
i |
j |
e |
g |
h |
- kromoszóma egy olyan megoldást képvisel,
melyben az első táblához a b földhasználat
(pld. fenyő erdő), a kettes táblához az a
földhasználat (pld. lombos erdő), a hármas táblához c
földhasználat (pld. tavaszi árpa), stb. tartozik.
- A teljesség kedvéért megemlítjük a fa
kódolást is, mely elsősorban a genetikus algoritmus
programfejlesztésre használt változatában - a genetikus programozásban
használatos. Ez a kódolás a kromoszómákat műveleti fákból vagy program
lépésekből építi fel. Mi az előbbire mutatunk be egy egyszerű példát:
|
|
|
( + x ( / 5 y ) ) |
- a második sorban található a kromoszóma fa által
reprezentált művelet csoport matematikai leírása.
A populáció létrehozása után a
genetikus algoritmus kiszámolja valamennyi kromoszóma jósági értékét. A jósági függvények a konkrét
alkalmazástól függnek. Az általunk vizsgált mezőgazdasági döntéstámogatási
rendszerben például a jósági értékeket a hatáselemző modulok számolják. Ha
például a gazdasági hatáselemző modul megkapja, hogy az első táblán fenyő erdő
földhasználatot tervezünk akkor kiszámítja az ebből a földhasználatból a
konkrét tulajdonságokkal rendelkező táblára eső nettó jelenlegi értéket. Ezt a
számítást elvégzi a kromoszóma valamennyi génjére és a jósági értékek
összegzéséből kialakul az adott kromoszóma jósági értéke.
Az új populáció kialakítása ezek
után a következőképpen megy végbe. Kiválasztják azokat a legjobb kromoszómákat,
melyek változatlanul tovább élnek az új populációban (ezt nevezik elitizmusnak).
A maradék kromoszómákból kiválasztják azokat a legjobbakat, melyeket
keresztezni fognak és az így létrejövő utódok kerülnek az új populációba.
Elvégzik a mutációt és a mutált kromoszómákat beviszik az új populációba.
Elhagyják az új populációból a fölösleges, alacsony jóságú kromoszómákat.
Ezt az általános menetet a
konkrét algoritmus paraméterezése vezérli. Meg kell adni, hogy az állomány hány
%-a legyen a keresztezésből származó utód, hány százalékán hajtsák végre a
mutációt, milyen százalékban (vagy jósági index alapján) történjen a
változatlan kromoszómák kijelölése, és azt is meg kell határozni, hogy a
változatlan egyedek részt vehetnek-e a keresztezésben, illetve, hogy a
keresztezést és mutációt egymástól függetlenül vagy egymás után hajtják-e
végre.
A kiválogatás (szelekció) ezután mind a változatlanul átadott, mind
a keresztezésre kiválasztott kromoszómák vonatkozásában az alábbi sémák
valamelyikével történhet:
- a rulett kerék módszer esetén képzik a jósági számok
összegét majd generálnak egy véletlen számot a 0 - [összeg] tartományban
és megnézik, hogy a szám melyik kromoszóma jósági értékre esik, és azt
választják ki, majd a véletlen szám generálástól kezdve ismétlik az
eljárást. Tulajdonképpen ez a számítás analóg azzal mintha a 6.37 ábra
szerint egy kördiagramba felraknák a jósági értékeket és egy rulett golyót
dobnának a forgó körre.
|
|
6.37 ábra - rulett kerék választás
|
- A módszer hátránya egyszerű szemléletből
látható a 6.38 ábra példáján: ha nagyon nagy a különbség a legjobb és a
többi jósági érték között igen kicsi a valószínűsége, hogy a kisebb jósági
értékű kromoszómák is kiválasztásra kerüljenek.
|
|
6.38 ábra - rulett kerék választás olyan esetben amikor a legnagyobb
jósági érték jelentősen eltér a többitől
|
- A fenti esetben célszerűbb használni a rangsorolásos keresési
módszert. A
módszer lényege (lsd. 3.39 ábra), hogy a kromoszómák jósági értékét egyenlővé
tesszük az eredeti jósági értékek fordított rangsorában elfoglalt
helyükkel, bár a továbbiak egyértelműsége érdekében meg kell jegyeznünk,
hogy gyakran a célfüggvényt minimalizálni kell, ilyen esetekben
természetesen a legkisebb célfüggvény értékek a legjobbak a rangsor
szerinti keresésnél is. A 6.38 ábra példájából tehát úgy vezethető le a
6.39 ábrán bemutatott rulett kerék, hogy a legrosszabb 4. kromoszóma 1
jósági értéket kap, a jóság szerint eggyel jobb 3. kromoszóma új jósági
értéke 2 lesz, a második legjobb 2. kromoszóma rangsor szerinti jósági
értéke 3, végül a legjobb 1. kromoszóma jósági értéke 4 lesz.
Általánosságban tehát N kromoszóma esetén a legjobb
kromoszóma rang szerinti jósági értéke N lesz. Annak a valószínűsége
pedig, hogy a kérdéses kromoszóma kerül kiválasztásra
p[%] = [rangsor szerinti jóság] *100 /
((N+1)*(N/2)). (6.7)
|
|
6.39 ábra - a 6.38 ábrán bemutatott jósági rulett kerék transzformálása
rangsor szerinti jósági értékeket tartalmazó rulett kerékbe
|
A rang
szerinti jóság hozzárendelés tovább finomítható a szelektív hangsúly ( SP =
selective pressure)
nevű súlyozási paraméter bevezetésével. Tételezzük fel, hogy kromoszómák úgy
vannak rangsorolva, hogy a legkisebb jóságú sorszáma (rangsorban elfoglalt
helyzete) Ssz az egyes, a legnagyobbé pedig az N. Akkor
Lineáris rangsorolás esetén: a rang szerinti
Jóság(Ssz) = 2 - SP + 2·(SP -
1)·(Ssz - 1) / (N -
1). (6.8)
Fordított
rangsorolás esetén, tehát ha a legrosszabb jóságú van az első helyen a legjobb
pedig a legnagyobb sorszámú N.-ik helyen, úgy a rang szerinti:
Jóság(Ssz) = 2 - SP + 2·(SP -
1)·(N - Ssz) / (N -
1). (6.9)
Az SP
érték 1 és 2 között változhat.
A
valószínűség értékére az utóbbi két kifejezés felhasználása esetén azt kapjuk,
hogy p(Ssz) = Jóság(Ssz) / N.
Ezek
után a keresés az eredeti rulett módszer szerint hajtható végre: generálunk egy
véletlen számot 0 és 1 között és azt a kromoszómát választjuk ki amelyik rang
szerinti, valószínűségben kifejezett jósági területére esik a véletlen szám (ha
a véletlen számot 0 és 1 közt generáljuk a valószínűséget természetesen nem
%-ban kell kifejezni). Jegyezzük meg, hogy a LADSS is a rang szerinti
kiválasztást használja.
A keresztezés és a mutáció az új generáció létrehozásának legfontosabb műveletei.
A keresztezési valószínűség és a mutációs valószínűség nevű
paraméterek mondják meg, hogy a kérdéses alkalmazás esetén a populáció hány
százaléka hoz létre keresztezéssel utódokat, illetve, hogy az állomány hány
százaléka megy keresztül mutáción. A szelekcióval kapcsolatban már említettük,
hogy a keresztezésre a nagy jósági értékkel rendelkező kromoszómákat kell kiválasztani.
A két művelet konkrét
végrehajtása függ a kromoszómák kódolásától, illetve a konkrét alkalmazástól. A
számtalan lehetséges módszer közül csak néhányat mutatunk be, melyeket a LADSS
rendszer esetében is használnak.
Bináris és érték szerinti kódolásnál
- az egy pontos keresztezést a 6.40 ábrán
szemléltetjük. Egy az alkalmazás által megadott pont (általában a felező
pont) két részre bontja mind a két szülő kromoszómát, az utódok pedig az
így nyert négy részből két-két olyan különböző részből alakulnak ki, mely
két rész egyke az első szülőtől, másika a második szülőtől származik.
|
|
6.40 ábra - egy pontos keresztezés bináris és érték szerinti kódolás
esetén
|
- két pontos keresztezés esetén a két szülő három-három
részre bontódik fel az alkalmazás paramétereként megadott pontokon és az
utódok az egyik szülőtől két részt a másik szülőtől egy részt örökölnek
(6.41 ábra).
|
|
6.41 ábra - két pontos keresztezés bináris és érték szerinti kódolás
esetén
|
- egyenletes (uniform) keresztezés során a leszármazott kromoszómák
génjei véletlenszerűen származnak az egyik vagy a másik szülőtől ( a 6.42
ábra tanulsága szerint egymás mellett több azonos szülőtől származó gén is
elhelyezkedhet).
|
|
6.42 ábra - egyenletes keresztezés bináris és érték szerinti kódolás
esetén
|
- A mutációt rendszerint az utódok egy kis
százalékára alkalmazzák azzal a céllal, hogy az algoritmus ne álljon le
valamely lokális szélsőértéknél, hanem közelítsen a globális optimumhoz.
Bináris kódolás esetén a művelet abból áll, hogy előre megadott számú gént
invertál, azaz ha a gén 0 volt átalakítja 1-re, ha 1 akkor 0-ra.
Szimbolikus érték szerint kódoláskor több átalakítási lehetőség van (n
szimbólum esetén (n-1)), ezért itt a meglévő szimbólumon kívüliek
közül véletlen szerűen választ egyet és azt írja be a meglévő helyére.
A bemutatott lépéseken keresztül
új és új populációkat gyárt az eljárás mindaddig, amíg az utolsó generáció
átlagos jósága el nem ér egy előre megadott értéket. Ennek a populációnak a
legjobb kromoszómája szolgáltatja a megoldás vektort. A keresés azonban a
legjobb esetben is csak egy cél szerinti optimumot szolgáltat. Ha több cél
optimális kielégítése a célunk, úgy a módszer csak akkor használható, ha
technikai továbbfejlesztését megelőzően új elvi meggondolásokat is bevezetünk.
A
többcélú optimalizálás
a Pareto
féle optimum helyek megkeresésén alapul. Vilfredo Pareto (1848-1923) olasz
szociológus és közgazdász, a Lusanne-i egyetem politikai gazdaságtan tanára
1896-97-ben kiadott Politikai Gazdaságtan Tankönyvében fogalmazta meg az
összemérhetetlen és esetenként ellentétes célokra irányuló optimalizálás
fogalmát. A meghatározás szerint létezik a megengedett megoldás
vektoroknak egy olyan felülete (két dimenziós esetben - görbéje) melyen haladva
az egyik cél eredményessége csak úgy javítható, ha a többi célok eredményessége
csökken. Ez a felület
a Pareto felület
illetve kétdimenziós esetben a Pareto görbe. Ha a vektorok helyett az eredményességet
ábrázoljuk akkor a Pareto frontról beszélünk.
|
Az
elmondottakat talán egyszerűbb megérteni egy ábra segítségével. A 6.43 ábrán
felrajzoltuk két cél szerinti optimalizálás (például gazdaságosság és
szociális hatékonyság) Pareto optimális frontját. A lilára festett terület jelképezi
az összes lehetséges megoldás eredményét. A nagybetűvel jelölt körök
egy-egy konkrét megengedett megoldási eredményt mutatnak. Egy cél szerinti
optimalizáláskor (feltételezve, hogy az optimum a célfüggvény maximumát
jelöli) az a megoldás jobb amelyik eredménye nagyobb. Ha azonban több célunk
van (pld. mint az ábrán 2) akkor a "nagyobb" szó már nem
alkalmazható a két megoldás eredményének az összehasonlítására. Ebben az
esetben a megoldások egymáshoz képesti viszonyát a dominancia fogalmával fejezhetjük ki. Nem
véletlenül különböztetjük meg a megoldást és a megoldás eredményét, mivel a
megoldás az a vektor, mely behelyettesítve a célfüggvényekbe szolgáltatja a
megoldás eredményét. Mivel a példán látható esetben két célfüggvény van egy
megoldás vektor mind a két célfüggvényből generál valamilyen eredményt. |
|
Valamely a vektor
akkor domináns a b vektor vonatkozásában, ha az a
vektor eredménye nagyobb a b vektor eredményénél valamennyi cél vonatkozásában. Az ábra példáján az A
ponthoz tartozó megoldás vektor domináns a B ponthoz tartozó
megoldás vektorhoz képest, a B ponthoz tartozó megoldás vektor
domináns a C ponthoz tartozó megoldás vektorhoz képest. Ha két
pont esetében az egyik cél szerinti eredmény kisebb a másik pedig nagyobb (vagy
fordítva) akkor a két ponthoz tartozó megoldás vektor indifferens egymáshoz
képest.
Ezek után úgy
is megfogalmazhatjuk a Pareto optimális frontot, hogy azt nem dominált
megoldások eredményei alkotják, azaz olyan megoldások eredményei, melyekhez
képest nem található domináns megoldási eredmény a lehetséges megoldások
tartományában.
Az első kérdés, ami a Pareto optimummal
kapcsolatban felmerülhet, hogy mi is lesz a végleges megoldás. A fogalom mint
látjuk alternatív megoldásokat igényel és a végleges megoldást a szakemberekre
vagy politikusokra bízza.
A másik kérdés, hogy miként lehet
megtalálni a Pareto optimális fronthoz tartozó megoldás vektorokat a genetikus
algoritmus segítségével. Erre a kérdésre kimerítő összefoglalást találunk Eckart
Zitzler doktori disszertációjában [10] .
Mielőtt azonban erre rátérnénk
egy ábra segítségével kibővítjük a genetikus algoritmussal kapcsolatban
megismert tereket (6.44 ábra). Az első térben a kódolt egyedek a kromoszómák
helyezkednek el. Ezt a teret hívjuk az egyedek terének . A genetikus algoritmus ebben a térben működik
(ezek közül az egyedek közül kerül kiválasztásra a keresztezési populáció, ezek
hajtják végre a keresztezést, mutációt, stb.).
Az egyedek teréből egy
leképezéssel jutunk el a döntési térbe. A leképezés vagy dekódolás kiinduló példánk
esetében megfelelteti az a betű kódját valamely földhasználatnak
(pld. lombos erdő), helyét (a gén kromoszómán belüli sorszámát) pedig egy előre
meghatározott táblának. Megjegyezzük, hogy másféle kódolás is elképzelhető
ugyanerre a feladatra, amelyek közül egyet a LADSS-ban is kipróbáltak: a gének
kódjai földhasználati százalékokat jelentenek, sorszámuk, pedig a kérdéses
földhasználati százalék prioritásának felel meg. Kézenfekvő, hogy ebben az
esetben a leképezés egy olyan allokációs függvény segítségével realizálódik,
mely a kérdéses prioritásoknak megfelelően rendeli hozzá a földterületeket a
kérdéses földhasználathoz. A döntési vektor esetünkben tehát nem más mind az
egyedből ilyen vagy olyan leképezéssel létrehozható táblák szerinti
földhasználat kijelölés.
A cél tér úgy jön létre, hogy a döntési vektorokat
behelyettesítjük a hatáselemző modulokba - vagy egyszerűbben
célfüggvényekbe (egy vektort mindig annyi célfüggvénybe helyettesítünk
be, ahány cél szerint optimalizálunk).
|
|
6.44 ábra - a genetikus algoritmusban szereplő terek kapcsolata
|
A többcélú optimalizálás során a rangsor szerinti jóságot előzetesen a dominanciából vezetik le,
majd egy megadott "fülke" sugár (sshare) nevű paraméter felhasználásával a közelítő
jóságokat csökkentve véglegesítik.
Az első lépésben tehát előzetes
jósági értéket rendelnek az xi kromoszómához mely értéke
jóság(xi, t) = 1 + pit, (6.10)
ahol pit azon kromoszómák száma, melyek az xi
kromoszómát dominálják a t populációban. A nem dominált kromoszómák előzetes
jósági értéke tehát 1, minél rosszabb a kromoszóma, annál nagyobb az előzetes
jósági értéke.
|
|
6.45 ábra - a előzetes jósági értékek többcélú optimalizáláskor két
célfüggvény esetén
|
Ezután sorba állítjuk valamennyi
kromoszómát oly módon, hogy az első helyen szerepeljenek a legjobb (tehát 1 előzetes
jósági értékű) a végén pedig a legrosszabb (n* ≤ N)
előzetes jósági értékű kromoszómák.
Elvégezzük a
Jóság(Ssz) = 2 - SP + 2·(SP -
1)·(N - Ssz) / (N - 1).
kifejezés
szerinti másodlagos jósági érték interpolálást, majd az azonos előzetes jósági
értékű kromoszómák másodlagos jósági értékeit átlagoljuk (gondoljunk arra, hogy
több olyan kromoszóma is van amelyek előzetes jósági értéke azonos, pld. 1
mégis a sorba állítás után a képletből különböző másodlagos jósági értéket
kapnak, ami nem indokolt, ezért kell másodlagos jósági értékeiket átlagolni,
nem változtatva meg ezzel az őszjósági érték mennyiséget).
Hogy az elmondottak világosabbak
legyenek a 6.45 ábra egyszerű példájára elvégeztük a hivatkozott számításokat,
melyeket a 6.5 táblázatban és a belőle készült torta-diagramot tartalmazó 6.46
ábrán mutatunk be.
|
|
6.5 táblázat - rangsor szerinti jósági értékek számítása többcélú
optimalizáláskor
|
|
|
6.46 ábra - a 6.5 táblázat szelekciós valószínűség értékeinek
tortadiagramos ábrázolása
|
Figyeljük meg, hogy mind a 6.45,
mind a 6.46 ábrán feltüntettük kis latin betűkkel jelölve az egyes kromoszómák
nevét, az elnevezés természetesen független az aktuális rangsorolástól.
A végső jósági értékek
kialakításához még szükség van az azonos rangú egyedek jósági
értékeinek csökkentésére bizonyos távolsági paraméter alapján. Arról van tehát
szó, hogy ha egymáshoz túl közel helyezkednek el azonos rangú egyedek, úgy
jósági értéküket egyedileg csökkentik, de e mellett gondoskodnak arról, hogy a
ranghoz tartozó összjósági érték ne változzon. A távolság meghatározható az
egyed térben, döntési térben vagy a cél térben. Mivel a módszer azt kívánja
elérni, hogy a Pareto front egyenletesen, de ne túl sűrűn legyen meghatározva,
ezért célszerű a távolság fogalmat a cél térben értelmezni. A sshare küszöb távolság meghatározása bonyolult feladat,
a LADSS Fonseca és Fleming javaslatát [11] alkalmazza, mely a célfüggvények maximális
és minimális értékeiből illetve a Pareto frontot alkotó optimális pontok
számából vezeti le sshare értékét.
Ha a küszöbérték megvan, akkor az
i∈P egyed végleges F(i) jósági értékét a
F'(i) előzetes jósági értékből a következő kifejezésből nyerjük:
F(i) = F'(i) / ∑j∈P s(d(i,j)) (6.11)
A fülke szám azaz a
kifejezés nevezője tehát nem más, mint a kérdéses egyed illetve a populáció
egyéb egyedei között fellépő s csökkentő függvények összege.
Gyakran használt csökkentő
függvény:
s(d(i,j)) = 1 - ( d(i,j)
/ sshare)a, ha d(i,j) < sshare, egyébként s(d(i,j))
= 0. (6.12)
A kitevőben szereplő a értéke rendszerint 1, a távolságok pedig
a célfüggvény értékek négyzet összegéből vont négyzetgyökkel számíthatók, bár
természetesen más normák is használhatók.
Ne felejtsük el, hogy a [11]-ben lévő eredeti javaslat szerint a
fülkeszámmal csökkentett egyedi jóságok rangonkénti összege meg kell, hogy
egyezzen a kérdéses rang szerinti jóság csökkentés előtti összegével, azaz, ha
az r rangú csökkentés előtti jóság összeget S'(r)-el, a
csökkentés utáni összeget pedig S(r)-el jelöljük, úgy az r rangú i
egyed végleges Frveg(i) jóságát a következő
képletből nyerjük:
Frveg(i) = Fr(i)·(S'(r)
/ S(r)). (6.14)
A bemutatott szelekciós módszer
csak egy az utóbbi évtizedben kidolgozott módszerek közül. A már hivatkozott [10] disszertációban számtalan más módszer
között megismerhetjük a disszertáció szerzőjének módszerét is, mely nem használ
"fülkéket", hanem két külön kromoszóma halmazt, egyet a domináns
egyet pedig a dominált kromoszómák számára. A Pareto front egyenletes
megjelenítését ez a módszer úgy éri el, hogy a "külső" - domináns
egyed halmazban klasztereket alakít ki, melyeket a végső megoldásban
centroidjaikkal reprezentál.
A műveletek definiálására illetve
korlátozására is számtalan lehetőség van, például a LADSS 6.46 ábrán bemutatott
kísérleti eredményeit létrehozó keresztezési műveletnél korlátozták a szülők
egymástól mért távolságát.
További megválasztandó kérdés a
leképező függvény illetve a kromoszómák kódolása, ami a LADSS példája esetében,
ahogy azt már említettük két verzióban is kipróbálásra került. Az egyszerűbb és
a próba futások során eredményesebb kódolási módszert a 6.47 ábra segítségével
szemléltetjük.
|
|
6.47 ábra - a táblák szerinti kromoszóma kódolás szemléltetése (a gén
sorrendje azonosítja a táblát, színe pedig a földhasználatot)
|
A leírt rendszer kipróbálására
egy 90 táblából álló 9 lehetséges földhasználatot alkalmazó skót felföldi mezőgazdasági
kutató állomás új földhasználat tervezésével kapcsolatban került sor. A két
konfrontáló cél a táj változatossága, melyet a Shannon-Wiener
indexszel számszerűsítettek illetve a gazdasági eredményesség (nettó
jelenlegi érték = NJÉ), melyet angol fontban fejeznek ki. A 6.48 ábrán látható,
hogy az egymás utáni populációk hogyan közelítik a Pareto frontot.
|
|
6.48 ábra - a táblák szerinti kromoszóma kódolással végrehajtott többcélú
optimalizálás populációi
|
A 6.49 ábra érdekes
összehasonlításra ad lehetőséget az egyéni szakértők, szakértő csoportok
hagyományos módon végrehajtott földhasználat tervezése és a prioritással
kiegészített földhasználat százalékos kódolással illetve tábla kódolással
végrehajtott genetikus többcélú programozás között. Az ábráról egyértelműen
leolvasható, hogy az egyéni illetve csoportos "gyalog" módszerek meg
sem közelítik a Pareto frontot. Az is látható hogy a vizsgált feladat esetében
a tábla szerinti kódolás nyújtja a legjobb eredményt. Az ábra feltünteti a
jelenlegi földhasználatot is.
|
|
6.49 ábra - a földhasználat tervezési módszerek összehasonlítása
|
A 6.50-es ábrán a végeredményt
látjuk generalizált formában.
|
|
6.50 ábra - a táblák szerinti kromoszóma kódolással végrehajtott többcélú
optimalizálás generalizált Pareto frontja
|
Ha az 1 pontot választjuk, úgy
maximális változatosság lesz minimális bevétel mellett, ha az 5 pontot akkor
olyan monokultúrát termesztünk valamennyi táblán, mely maximális pénz hozamot
eredményez, a 2, 3 és 4 pontok különböző kompromisszumokat reprezentálnak a két
cél között.
A döntéstámogató rendszerek keretei
Már az eddigi tárgyalásunk során
is igyekeztünk rámutatni a példáként szereplő rendszerek szoftver
architektúrális jellemzőire, különös tekintettel a GIS és az egyéb modulok
kapcsolatára. Jelen összefoglalásunkban elsősorban a különböző tematikus
modellek kapcsolatát vizsgáljuk, s e mellett még bizonyos felhasználói
szempontokat is szeretnénk a főbb keret-típusokhoz hozzákapcsolni.
Abból kell kiindulnunk, hogy a
térbeli döntés támogató rendszerek alapvetően a mezőgazdasági, környezeti,
regionális, közlekedési, katasztrófa-védelmi tervezéshez nyújtanak segítséget.
A felsorolt és más területfüggő témákban a tervezés azt hivatott meghatározni,
hogy az elhatározott műszaki, mezőgazdasági, szociális, stb. intézkedések
milyen hatást gyakorolnak az élővilágra, a szociális szférára, környezetre,
melyek a gazdasági hatások, stb. Ezeknek az intézkedéseknek valamely
kompromisszum szerinti optimumot kell biztosítaniuk a várható hatások
vonatkozásában.
A döntéstámogató rendszerek a
hatások vizsgálatára specializált modelleket használnak, melyeket a korábbi
egy-két évtizedben szűken specializált természet-, vagy társadalom tudósok
fejlesztettek ki. Ezek a modellek egy-egy partikuláris jelenség outputját
dolgozzák ki megadott input hatására. Ezek közül a modellek közül azokat,
melyeket a tapasztalat igazolt és a kérdéses tudomány terület elfogadott az
amerikai terminológiában "legacy" (örökség) modelleknek nevezik.
Céljuk amint látjuk, elsősorban a jelenségek megismerése - a kutatás volt.
További jellemzőik, hogy a kérdéses szakterület terminológiája alapján végzik
az adat-meghatározást, különböző időben készültek, különböző információ
technológiai szinten és eszközökkel. Ez utóbbi magyarul azt jelenti, hogy
különböző program nyelveken íródtak, különböző operációs rendszerek alá.
Nagyon fontos
jellemzőjük ugyanakkor, hogy a kódjuk kipróbált és használatukhoz a
szakterületek ragaszkodnak.
A tervező vagy döntéshozó azonban
nem kutatni akar egyes részterületeket, hanem olyan terveket akar
megvalósítani, melyek számtalan szakterületi modell működését befolyásolják. A
tervező feltételezi, hogy a modell a valóságot tükrözi és outputját alkalmazni
akarja.
További jogos igénye a tervezőnek,
hogy a döntési folyamatban a modellek esetleges kölcsönhatása is figyelembe
vehető legyen.
A folyamatos fejlődésben lévő
szoftver rendszereket elég nehéz osztályozni. Feltételesen elfogadhatjuk Westervelt
és Shapiro [12] osztályozását,
mely szerint megkülönböztetünk
- önálló programokat;
- közös adatokra és eljárásokra támaszkodó
rendszereket;
- folyamatok közti kapcsolatot realizáló
architektúrákat;
- dinamikus modell kapcsolattal rendelkező
rendszereket;
- szétosztott objektumokkal működő
szoftvereket;
- új modellező nyelveken alapuló
fejlesztéseket;
- oktatási modellező rendszereket.
- Az önálló programokból álló rendszerekre több példát is
bemutattunk. Amint láttuk a modellek különböző nyelveken készültek,
térbeli - GIS integráltságuk különböző fokú és jellegű volt, igen
hasznosaknak bizonyulhatnak egy szűk felhasználói közösség számára.
Általános
igény ugyanakkor ezekkel a programokkal szemben, a könnyebb, szélesebb rétegek
által való használat, ami maga után vonja a szoftverek gazdaságosságának
növekedését, valamint az, hogy az ilyen modellek használjanak más szakterületi
modellekkel kapcsolható interdiszciplináris fogalmakat és adatokat.
- A közös adatokra és eljárásokra támaszkodó
rendszerekre jó
példa néhány nyitott, programozható GIS szoftver által megvalósított
modell integráció. Különösen az ingyenes GRASS GIS
alkalmas erre a célra, mely szubrutin könyvtáraihoz kapcsolhatók a
természeti és társadalmi modellek. Más példák az ESRI ArcView
GIS Avenue nevű programnyelvét használják a modellek integrálására.
Ebben az architektúrában több modell fut ugyanazon a számítógépen,
ugyanazon operációs rendszer alatt, virtuálisan a GIS szoftver részeként
azaz közösen használva a GIS adatokat és műveleteket. Rendszerint a GIS
szoftver grafikus felhasználói interfésze bővítésével érhetők el a
modellek, de lehetőség van önálló grafikus felhasználói interfész
kialakítására is mint ahogy az IPDSS esetében láttuk.
Akármelyik megoldást is alkalmazzák, a közös interfész egyszerűsíti a
tanulási folyamatot és szélesebb felhasználói körök számára teszi
hozzáférhetővé a rendszert. Az ilyen rendszerek létrehozása akkor nehezül
meg, ha a modellező modulok már rendelkeztek beépített grafikus -
megjelenítő rendszerrel. Szerencsére a legtöbb régi modellező szoftver még
a grafikus interfészek megjelenése előtt készült, ezért a kódjaikat nem
kell átírni, hanem csak a bemenő és kimenő adatokat kell a közös
adatformátumba transzformálni.
- A folyamatok közti kapcsolatot realizáló
architektúrák
annyiban különböznek az előző csoporttól, hogy az egyes modellező
programok változatlanul kerülnek alkalmazásra a létrehozandó rendszerben.
Minden modellező program megtartja a saját felhasználói interfészét, a
keret program feladata, hogy meghatározza az egyes modulok egymásutánját,
illetve hogy a megelőző modul outputját átalakítsa a követő modul
inputjába.
Ilyen
rendszert legegyszerűbben mint operációs rendszerbeli (DOS vagy UNIX) szkriptet
lehet elkészíteni. Az operációs rendszerek fejlődésével azonban megjelent a
folyamat grafikus programozásának igénye. Ilyen grafikusan programozható
keretrendszer a FRAMES
(Framework for Risk Analysis in Multimedia Environmental Systems = Kockázat
Elemző Többközegű Környezeti Keretrendszer), melyet a Pacific Northwest
National Laboratory nevű amerikai állami kutatóintézet készített el és bocsát
ingyen a felhasználók rendelkezésére. A rendszer egységes output formátumot
alkalmaz, mely változatlan formában inputként jelentkezik más programok számára
(6.51 ábra).
|
|
6.51 ábra - a FRAMES felépítése
|
Ez a
körülmény ugyan igényli a modellező modulok be-, és kimeneti kódjának átírását,
a tényleges modellező részeket azonban nem érinti. A figyelembe vett közegeket,
melyben a szennyezés terjed illetve a rájuk vonatkozó modellező modulok
egymásutánját a felhasználó a grafikus interfészen ikonok kiválasztásával és
összekötésével jelölheti ki (6.52 ábra).
|
|
6.52 ábra - a FRAMES grafikus felhasználói interfésze
|
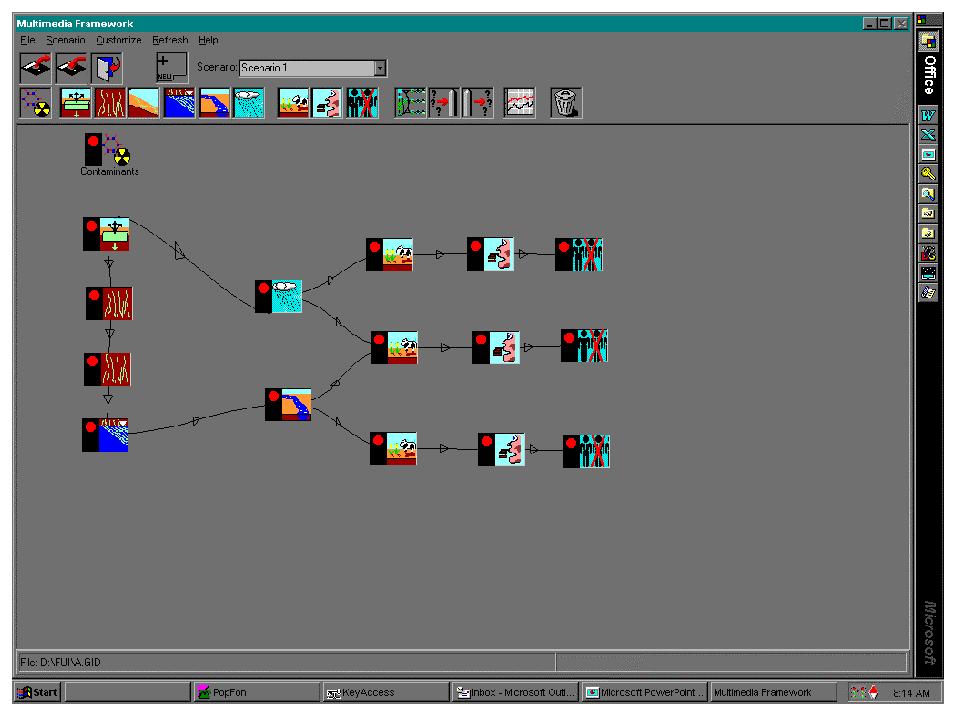
Az
eredmények megjelenítését a FRAMES grafikus csomagja teszi lehetővé.
A
csoport nagy előnye, hogy a hagyományos modellező programok lényegi változás
nélkül használhatók, fejlesztésükben nem kell figyelembe venni az integrációs
igényeket, ugyanakkor a gyakorlati feladatok komplexen, több tényező figyelembe
vételével viszonylag egyszerűen állíthatók össze. Természetesen az ilyen típusú
rendszerek eredményes használatának is döntő feltétele megfelelő tematikus
térbeli adatbázisok megléte.
- A folyamatok közti dinamikus kapcsolatot
realizáló architektúrák azt igénylik, hogy a modulok futás közben is képesek legyenek az
adatcserére - a visszacsatolásra. Ilyen feladatokra az előző architektúra
szekvenciális alapkoncepciójából kiindulva nem alkalmas. Ezt az igényt úgy
lehet kielégíteni, ha az egész modellből egy programot csinálunk olymódon, hogy az egyes modulok ebben a
programban szubrutinokként vagy objektum orientált program
esetén objektumokként legyenek jelen. Az architektúra működését,
előnyeit már viszonylag részletesen tárgyaltuk a DIAS példáján.
- Hálózaton szétosztott objektumokról már sok szó esett az előző
fejezetekben. Az az új koncepció, hogy egy nagy szuper komputer helyett
számtalan hálózattal összekapcsolt komputeren oldjuk meg a nagy processzor
igényű feladatokat a hálózatok technikai tökéletesedésével kezd ábrándból
reális elképzeléssé válni. Ahogy azonban a WEB
GIS-szel kapcsolatban már elmondtuk a technológia még nem érett,
várhatóan 2-3 év szükséges a megszokott alkalmazásához.
Ugyan
ezt mondhatjuk el a hálózatos, dinamikus kapcsolatot realizáló komplex
modellezésről is azzal a különbséggel, hogy itt a hálózatos módszerek komersszé
válásához még több időre (5-6 év) lesz szükség. Példaként az érdeklődő
tanulmányozhatja a Virginiai Egyetem Legion
projektjét a világméretű virtuális komputerre és a gyakorlati kipróbáláshoz le
is töltheti a projekt keretében készült kliens szoftver 1.7 verzióját.
- Az új modellező nyelvek azt az integrációs feladatot
célozzák meg, hogy lehetővé tegyék a szaktudományokon belül
kifejlesztetett modellező algoritmusok automatikus integrálását egy
koordinált részekből álló szoftver programba.
Talán
legjobb példája ennek a típusnak az SME (Spatial Modeling
Environment = Térbeli Modellező Környezet). A UNIX-os szoftver szabadon letölthető az SME honlapjáról.
A rendszer kombinálja a Stella
típusú szimuláció modellező szoftvert a szimulációt hatékonyan végrehajtó
környezettel. Az SME párhuzamosan futtatja a Stella-szerű szimulációs
modelleket, melyek a raszter GIS adatbázis celláihoz vannak kapcsolva. Az
inicializáló paramétereket a modellek a GIS fedvényekből nyerik. Az SME
lefordítja a cella szimulációt specifikáló modelleket a közös MML (Modular
Modeling Language) nyelvre és későbbi használatra könyvtárakat hoz belőlük
létre. Térbelileg explicit szimulációs modelleket a korábban könyvtározott
modulok kiválasztásával, a változók illesztésével és az aktualizált modell C++
nyelvre fordításával lehet az SME kódgenerátora segítségével létrehozni.
- Az oktatási modellező szoftvereket az új modellező nyelvek olyan
részhalmazának tekinthetjük, melyek főfeladata, nem a nagyon összetett
modellek létrehozása, hanem az, hogy a programozásban nem túl képzett
hallgatók gyorsan létre tudjanak hozni multidiszciplináris modelleket.
Példaként megemlíthetjük a már többször emlegetett Stellát, a Powersim Studio 2000
Express-t (ez az oktatási verzió 90 napos használatra szabadon letölthető),
de leginkább a MIT Media Lab-ban készített Javában írt tehát platform
független StarLogo-ra
szeretném felhívni az érdeklődők figyelmét, mely a honlapról szabadon letölthető.
Végül foglaljuk össze egy
táblázatban az egyes típusok főbb tulajdonságait a használat és fejlesztés
legfontosabb szempontjai alapján:
|
|
"hagyományos"
szoftver használat |
tudósok
kellenek a működtetéshez |
szétosztott
feldolgozás |
rendszerek
közötti visszacsatolás |
gyors modell
fejlesztés |
multidiszciplináris
modellezés |
elérhető a
nem szakemberek számára |
|
önálló
programok |
5 |
5 |
3 |
0 |
0 |
0 |
0 |
|
közös adatok
és eljárások |
4 |
5 |
3 |
1 |
2 |
1 |
0 |
|
folyamatok
közötti kapcsolatok |
3 |
4 |
4 |
2 |
1 |
2 |
0 |
|
folyamatok
közötti dinamikus kapcsolatok |
2 |
4 |
4 |
5 |
1 |
4 |
1 |
|
kapcsolatok
szétosztott objektumokkal |
1 |
3 |
5 |
5 |
1 |
5 |
2 |
|
új modellező
nyelvek |
0 |
1 |
5 |
5 |
5 |
5 |
5 |
|
oktatási
modellezés |
0 |
0 |
0 |
0 |
5 |
5 |
5 |
6.6 táblázat - a modellező szoftver megközelítések összehasonlítása
Az egyes típusok jóságát 0-tól
5-ig terjedő osztályzatokkal és hozzájuk választott színekkel értékeltük. Nem
nehéz rájönni, hogy a megfelelő kerettípus megválasztása tulajdonképpen a már
jól ismert többcélú (de nem térbeli) optimalizálási feladat. Természetesen még
több célt is felsorolhattunk volna, de a bemutatottak alapján is belátható,
hogy a választás mindenképpen kompromisszummal jár. A fő probléma
tulajdonképpen a "hagyományos" (legacy) modellek változatlan
felhasználásában van. Talán nem járok messze az igazságtól, ha úgy gondolom,
hogy a szaktudományok fejlődésével ezek a modellek is előbb utóbb elavulnak és
a jövőbe mutató döntés az új modellező nyelvek alkalmazásán alapulhat. Ez az
állítás akkor is igaz, ha bizonyos régi modell algoritmusa maradandónak
bizonyul. Ebben az esetben azt felhasználhatjuk az új modell kifejlesztéséhez.
(1) A tanulmány része az OTKA T 031719 témaszámon folyó kutatásnak.
·
a következő részben az intelligens gépjármű navigációs
rendszereket tárgyaljuk
·
esetleg visszatérhet az előző részhez
·
illetve a tartalomjegyzékhez
Megjegyzéseit E-mail-en várja a szerző:
Dr. Sárközy Ferenc